Resources
In this section, the resources exploited for the DICE project are presented, and related software and data will be distributed as soon as they become available. Experimentation within the DICE project will be brought forth with a variety of tools, both software and hardware, which are briefly presented below.
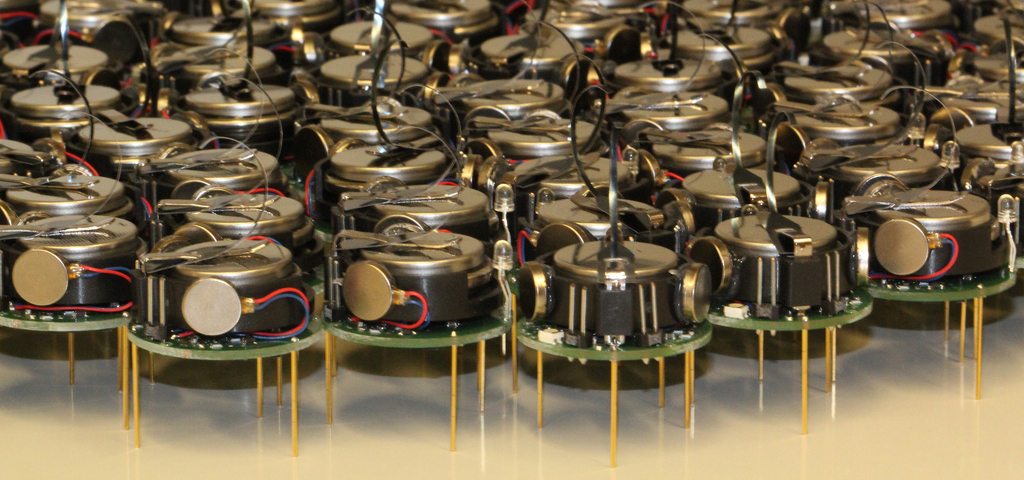
The Kilobot robot platform
Kilobots are simple and inexpensive robots developed by the Harvard’s Self-organizing Systems Research Group. These robots are excellent to test control systems for large groups, and to study strategies for complex collective problem solving, given also the limitations of the robotic platform. For full details, see the webpage dedicated to the kilobot robot, and have a look also to the Kilobot Youtube Channel playlist.
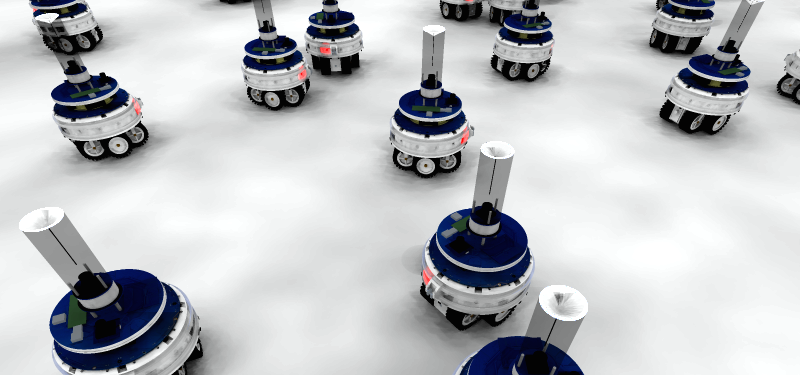
The ARGoS simulator
Experiments in the engineering of distributed multi-robot systems will be initially conducted in simulation, exploiting the ARGoS framework, which already proved flexible and robust in previous projects (e.g., Swarmanoid). A package for simulating the kilobot robots is being developed and tested within framework of the the DICE project.
Recent Posts
Contact








Telephone
+39 06 44595 277
Fax
+39 06 44595 243
ISTC-CNR
via San Martino della Battaglia 44
00185 Roma
Italia
 |
DICE Project, founded by the FP7 "People" Programme within the Marie-Curie Career Integration Grant scheme (ID: 631297) |