This page contains support material of the paper "Evolution of Prehension Ability in Anthropomorphic Robotic Arm" submitted to the "Frontier to Neuro-Robotics". In particular, we provide an exaustive list of video showing the robot in action.
The Experimental Setup
In this section we briefly describe the simulated robot, the architecture of the neural controller, and the adaptive process used to train the robot to grasp objects of different shapes. For details of all parameters used see the paper.
The Robot
The robot used in the experiments reported is a simulated humanoid robot including an anthropomorphic robotic arm with 7 actuated degrees of freedoms (DOFs), a robotic hand with 20 actuated DOFs, proprioceptive and touch sensors distributed within the arm and the hand, and a vision system located in the robot's head.
The robotic hand (Figure 2) is composed of a palm and fourteen phalangeal segments that make up the digits (two for the thumb and three for each of the other four fingers) connected through 15 joints with 20 DOFs.
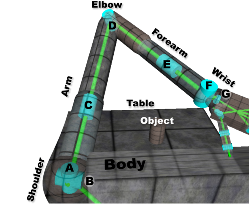
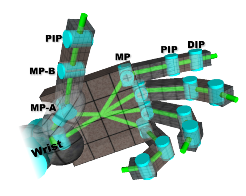
Figure 1.The kinematic chain of the arm and the hand. Cylinders represent rotational DOFs. The axes of cylinders indicate the corresponding axis of rotation. The links among cylinders represents the rigid connections that make up the arm structure.
The Neural Controller
The robot is provided with the neural controllers shown in Figure 2 which include 21 sensory neurons, five internal neurons with recurrent connections and 16 motor neurons.
The object position sensors, arm and hand propriosensors, and tactile sensors encode the state of the corresponding sensors described above. The actuators of the arm encode the activity of the 14 motor neurons controlling the corresponding muscles of the arm. The two actuators of the hand encode the desired extension/flexion state of the thumb and of the other four fingers, respectively (i.e. the four fingers are not controlled independently). See the paper for details.
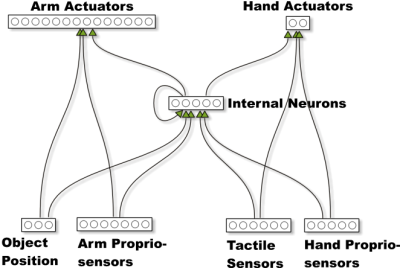
Figure 3. The architecture of the neural controllers. Arrows indicated blocks of fully connected neurons. Internal and hand actuators neurons are also provided with a bias.
The Adaptive Process
The free parameters of the neural controller – the connection weights, the biases of internal neurons and hand actuators, and the time constant of leaky-integrator neurons – have been adapted through an evolutionary robotics method with following parameters:
| Population size: | 100 |
| Number of Generations: | 400 |
| Genotype: | a string of 6096 bits encoding 366 connection weights, 7 biases and 8 time constant |
| Mutation rate: | 1.5% |
| Crossover: | Not Used |
| Selection type: | Ranking selection |
| Offspring: | Five (with elitism) |
| Fitness: | Ability to grasp (see paper for the formula) |
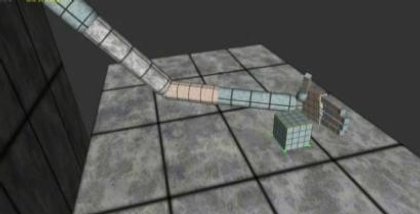
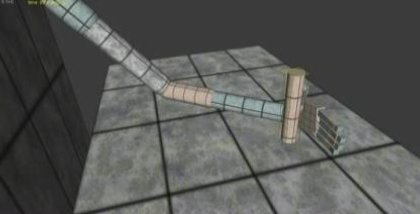
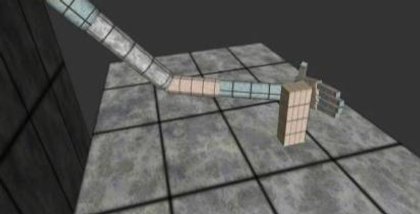
Videos of Robot in Action
| Grasping Sphere | Grasping Cylinder | |
| Robot 5 Fitness: 1.0 |
 Download Hi-Res video (39Mb) |
 Download Hi-Res video (31Mb) |
| Robot 6 Fitness: 1.0 |
 Download Hi-Res video (40Mb) |
 Download Hi-Res video (28Mb) |
| Robot 7 Fitness: 1.0 |
 Download Hi-Res video (39Mb) |
 Download Hi-Res video (28Mb) |
| Robot 1 Fitness: 0.98055 |
 Download Hi-Res video (32Mb) |
 Download Hi-Res video (36Mb) |
| Robot 3 Fitness: 0.8895598 |
 Download Hi-Res video (33Mb) |
 Download Hi-Res video (31Mb) |