Spring Berman
Spring Berman is an Associate Professor of Mechanical and Aerospace Engineering and graduate faculty in Computer Science and Exploration Systems Design at Arizona State University (ASU). At ASU, she is Associate Director of the Center for Human, Artificial Intelligence, and Robot Teaming (CHART), a center within the Global Security Initiative, and director of the Autonomous Collective Systems Laboratory. Her research focuses on control and estimation strategies that enable swarms of resource-constrained robots to reliably perform tasks in unknown environments with limited data and communication. She is a recipient of the 2016 ONR Young Investigator Award and the 2014 DARPA Young Faculty Award. Before joining ASU, she was a postdoctoral researcher in Computer Science at Harvard University. She received a Ph.D. in Mechanical Engineering and Applied Mechanics from the University of Pennsylvania and a B.S.E. in Mechanical and Aerospace Engineering from Princeton University.
Scalable Control of Robotic Swarms in Inaccessible, Uncertain Environments
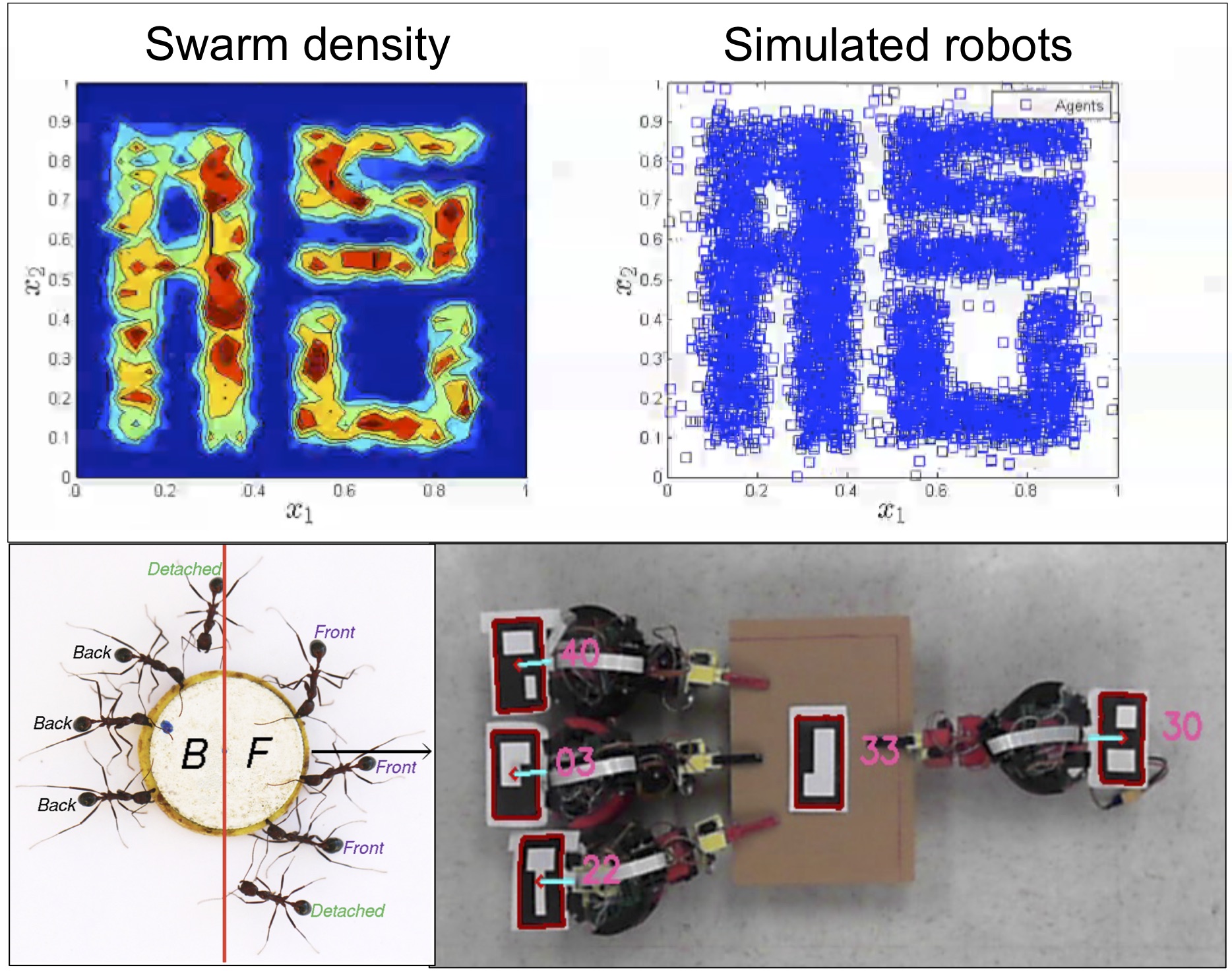
We are addressing the problem of controlling swarms of robots that lack global localization, prior data about the environment, and reliable inter-robot communication. As in natural swarms, the highly resource-constrained robots would be restricted to information obtained through local sensing and signaling. We are developing a rigorous control framework for swarms that are subject to these constraints. This framework will enable swarms to operate largely autonomously, with user input consisting only of high-level directives that map to a small set of robot parameters. In this talk, I describe our work on various aspects of the framework, including scalable control strategies for coverage, mapping, task allocation, and cooperative manipulation. We use stochastic and deterministic models from chemical kinetics and fluid dynamics to describe the robots’ roles, task transitions, and spatiotemporal distributions at both the microscopic (individual) and macroscopic (population) levels. We also employ techniques from nonlinear control theory, optimization, and algebraic topology, and we model analogous behaviors in ant colonies to identify robot controllers that yield similarly robust performance. We are experimentally validating these techniques with mobile robots, including small robots called “Pheeno” that we have designed to be low-cost, customizable swarm robotic platforms.