Heiko Hamann
Heiko Hamann received his doctorate in engineering from the University of Karlsruhe, Germany in 2008. He did his postdoctoral training in swarm robotics, modular robotics, and evolutionary robotics at the Zoology department of the University of Graz, Austria. He was assistant professor of swarm robotics at the University of Paderborn, Germany from 2013 until 2017. Since 2017 he is professor for service robotics at the University of Lübeck, Germany. He coordinates the EU-funded project flora robotica, which develops and investigates closely linked symbiotic relationships between robots and natural plants to explore the potentials of a plant-robot society able to produce architectural artifacts and living spaces. His main research interests are swarm intelligence, swarm robotics, evolutionary robotics, applications of evolutionary computation in software engineering, and modeling of complex systems.
Liberated Robots Choose to Swarm: An Evolutionary Robotics Approach
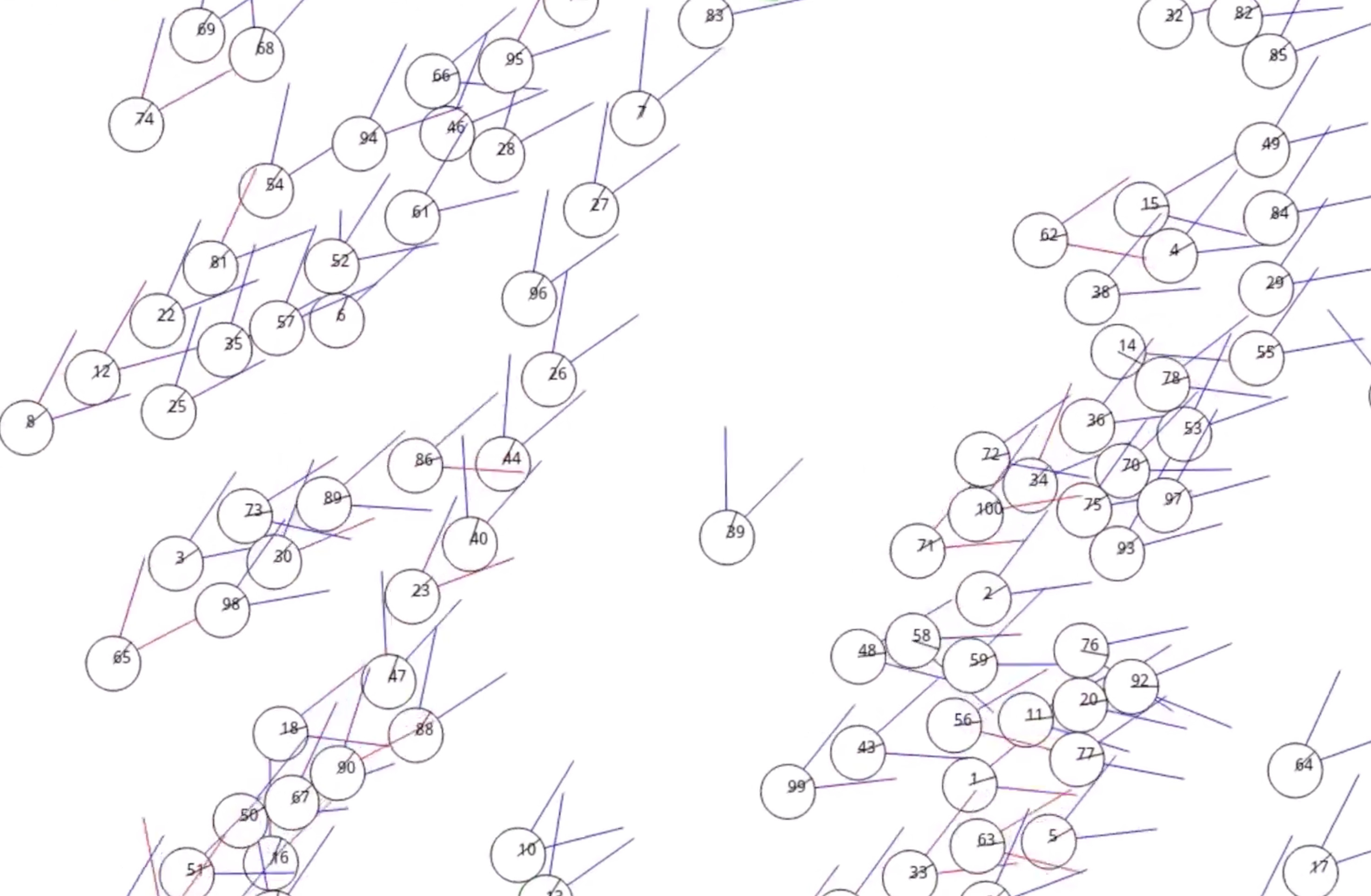
What about we don't tell our robots what they have to do? With the approach of minimizing surprise, we only ask the robots to create situations that allow for easy predictions. Each robot has a controller (artificial neural network, ANN) to select the next action and a prediction machine (ANN) to predict future sensor input (of the next time step). Here, these pairs of networks are tuned by an evolutionary algorithm. The fitness (reward) is based on correct predictions only. There is no desired or predefined behavior. Applied to robot swarms, we observe typical swarm behaviors, such as aggregation, dispersion, and flocking. In a self-assembly setup we observe also aggregation, dispersion, as well as line formations, and the formation of triangular lattices. A remaining challenge is to increase task complexity.