Ira B. Schwartz
Trained and educated as both a mathematician and physicist, Dr. Schwartz and his collaborators, post doctoral fellows and students have impacted a diverse array of applications in the field of nonlinear science. Dr. Schwartz has over 120 refereed publications in areas such as physics, mathematics, biology and chemistry. The main underlying theme in the applications field has been the mathematical and numerical techniques of nonlinear dynamics and chaos, and most recently, nonlinear stochastic analysis and control of cooperative and networked dynamical systems. Dr. Schwartz has been written up several times in Science and Scientific American magazines, has given invited and plenary talks at international applied mathematics, physics, and engineering conferences, and he is one of the founding organizers of the biennial SIAM conference on Dynamical Systems. Several of his discoveries developed in nonlinear science are currently patented, including collaborative robots, synchronized coupled lasers, and chaos tracking and control for which he was awarded the US Navy Tech Transfer award. Dr. Schwartz is an elected fellow of the American Physical Society and the current vice-chair of the SIAM Dynamical Systems Group.
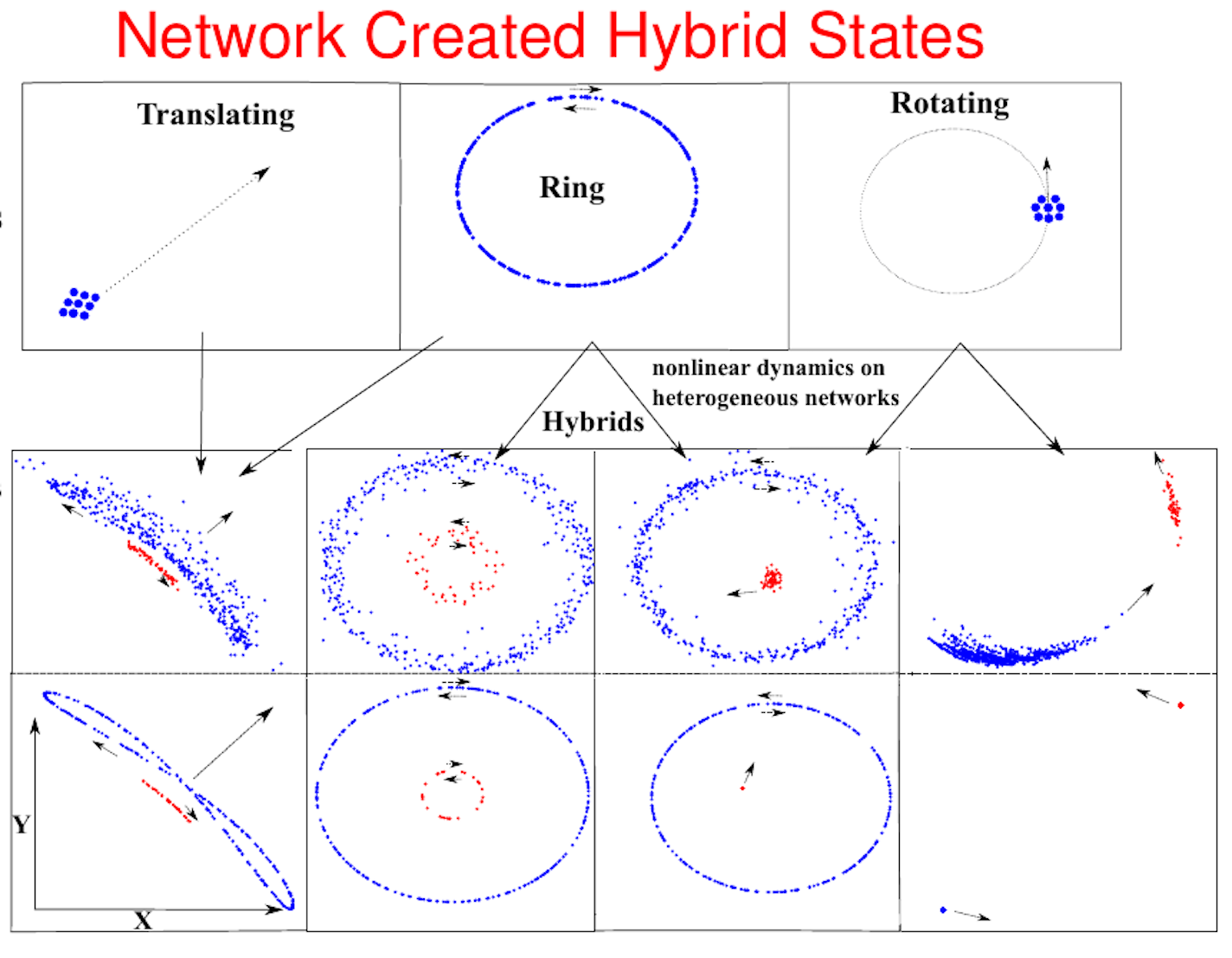
Emergent Pattern Forming Swarms and the Physics of Mixed-Reality
Swarming behavior
continues to be a subject of immense interest because of its
centrality in many naturally occurring systems in physics and biology,
as well as its importance in engineering applications such as
robotics. Here we examine the effects on coherent swarm pattern
formation from aspects of communication, such as latency effects, link
topology and environmental uncertainty.
With the availability of
ever more cheap and powerful computing, interest in the use of
mixed-reality and swarm experiments has grown considerably in the
biological, engineering and physical sciences. Broadly speaking, these
experiments consist of a simulated, or virtual model coupled directly
to a physical experiment. Within the physical experiment, it is
typical to find a good deal of uncertainty and noise since it is
connected to the real world, and thus subjected to random
perturbations. In contrast, the virtual part of the coupled system
represents a somewhat idealized version of reality in which noise can
be eliminated entirely. Thus, mixed-reality systems have very skewed
sources of uncertainty spread through the entire system.
In this
talk, we consider the pattern formation of delay - coupled swarms
theoretically and experimentally to illustrate the idea of
mixed-reality. Motivated by physical experiments, we then consider a
model of a mixed-reality system, and show how noise in the physical
part of the system can influence the virtual dynamics through a large
fluctuation, even when there is no noise in the virtual components. We
quantify the effects of uncertainty by showing how characteristic
times of noise induced switching between swarm patterns scale as a
function of the coupling between the real and virtual parts of the
experiment. This work is done in collaboration with Klimka
Szwaykowska, Thomas Carr, and Jason Hindes.