Metin Sitti
Metin Sitti received the BSc and MSc degrees in electrical and electronics engineering from Bogazici University, Istanbul, Turkey, in 1992 and 1994, respectively, and the PhD degree in electrical engineering from the University of Tokyo, Tokyo, Japan, in 1999. He was a research scientist at University of California at Berkeley, USA during 1999-2002 and a professor in Department of Mechanical Engineering and Robotics Institute at Carnegie Mellon University, USA during 2002-2016. Since 2014, he has been the director of the Physical Intelligence Department at the Max Planck Institute for Intelligent Systems in Stuttgart, Germany. His research interests include small-scale physical intelligence, mobile robotics, microrobotic swarms, bio-inspiration, soft robotics and medical robotics. He is an IEEE Fellow. He received the Rahmi Koc Science Prize in 2018, SPIE Nanoengineering Pioneer Award in 2011, and NSF CAREER Award in 2005. He received many best paper and video awards in major conferences. He is the editor-in-chief of Progress in Biomedical Engineering and Journal of Micro-Bio Robotics and associate editor in Extreme Mechanics Letters, Advanced Material Technologies, and Biomimetics & Bioinspiration journals.
Mobile Microrobotic Swarms towards Medical Applications
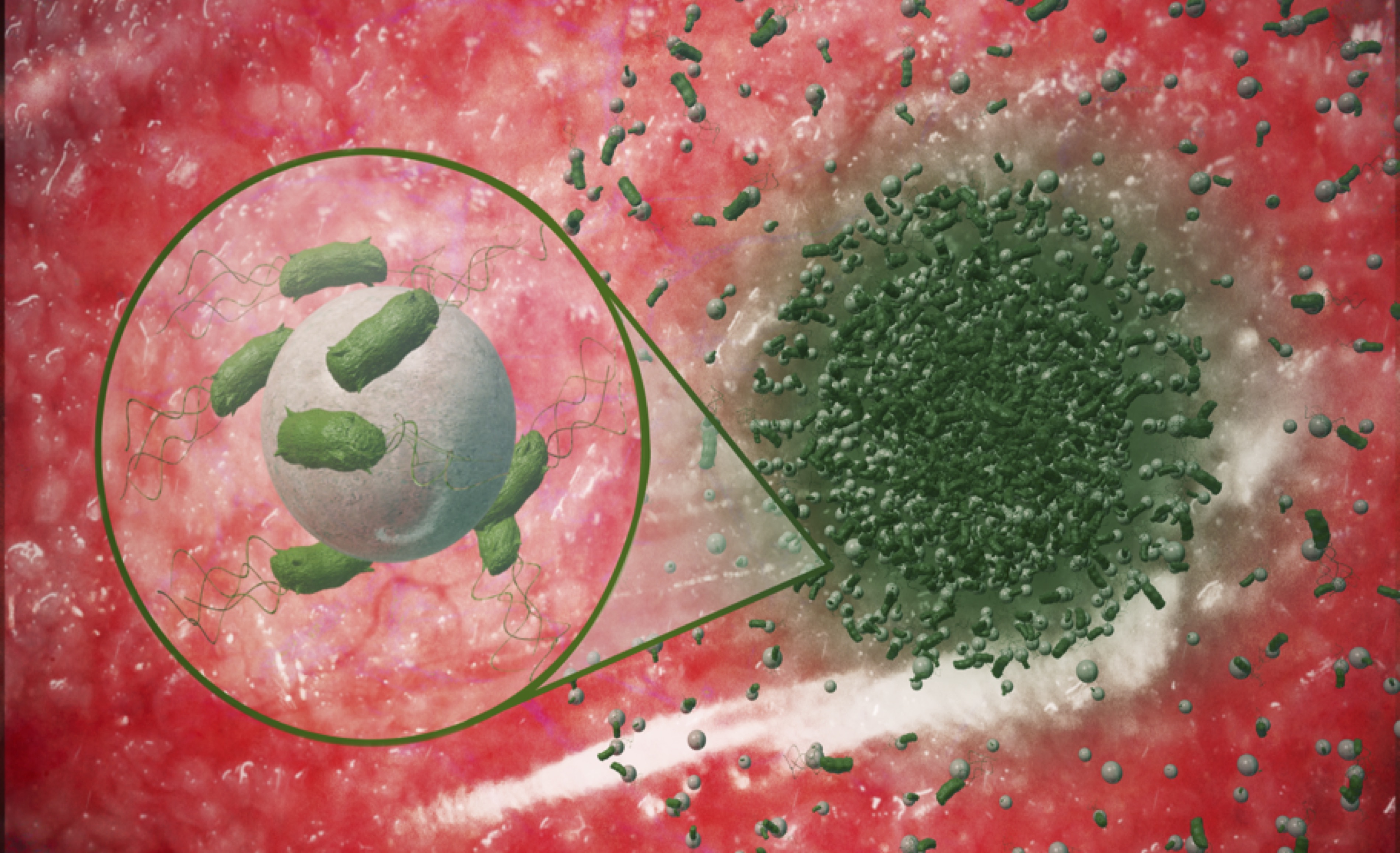
While there has been a significant progress on design, fabrication and real-world applications of single mobile microrobots in the last decade, microrobotic swarms have not been studied and applied much yet. Therefore, this presentation will cover our recent research activities on design, fabrication and applications of mobile microrobotic swarms. Since mobile microrobots are limited with their on-board actuation, powering, sensing, communication, and computing capabilities due to miniaturization limits currently, they are either remotely actuated/controlled using external magnetic, optical or acoustic fields/gradients or self-propelled by attached biological cells or using the physicochemical interactions by the liquid medium that they operate or by light in the operation space. First, bacteria- and microalga-driven self-propelled microswimmer swarms are presented towards their active local drug delivery type of medical applications. In vitro studies of such swarms are promising for cancer therapy with less or no side effects. Next, external magnetic field-based spinning micro-rafts at the air-water interface are proposed to study the dynamic self-assembly and collective navigation and object manipulation of microrobotic swarms in 2D. Moreover, recent self-assembled magnetic microrobot swarms at the air-water interface are shown to create programmed reconfigurable 2D patterns and achieve collective navigation and manipulation functions towards future medical applications.