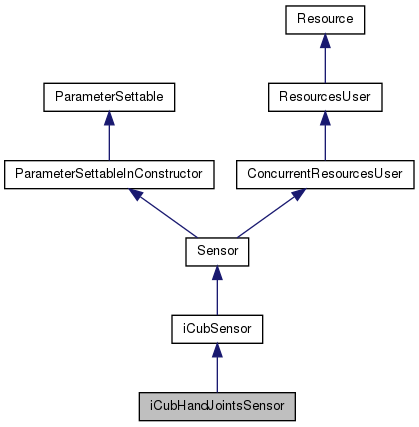
iCubHandJointsSensor Class Reference
Hand prorpioceptive sensors: 9 dofs. More...
Public Member Functions | |
| iCubHandJointsSensor (ConfigurationParameters ¶ms, QString prefix) | |
| Constructor and Configure. | |
| ~iCubHandJointsSensor () | |
| Destructor. | |
| void | save (ConfigurationParameters ¶ms, QString prefix) |
| Save the parameters of the iCubHandJointsSensor into the ConfigurationParameters. | |
| int | size () |
| Return the number of neurons on which the Sensor will set the input: 7. | |
| void | update () |
| Update the state of the Sensor every time step. | |
Static Public Member Functions | |
| static void | describe (QString type) |
| Describe all the parameter for configuring the iCubHandJointsSensor. | |
Protected Member Functions | |
| void | resourceChanged (QString resourceName, ResourceChangeType changeType) |
| The function called when a resource used here is changed. | |
Protected Attributes | |
| QString | icubHand |
| from which arm the joint's angles are read | |
| MultiMotorController * | icubMotors |
| the motor controller of the icub arm | |
Detailed Description
Hand prorpioceptive sensors: 9 dofs.
Definition at line 501 of file icubsensors.h.
Constructor & Destructor Documentation
| iCubHandJointsSensor | ( | ConfigurationParameters & | params, |
| QString | prefix | ||
| ) |
Constructor and Configure.
- Parameters:
-
params is the ConfigurationParameters containing the parameters prefix is the path prefix to the paramters for this Sensor
Definition at line 833 of file icubsensors.cpp.
References ConfigurationHelper::getString(), iCubHandJointsSensor::icubHand, iCubSensor::icubResource, iCubSensor::neuronsIteratorResource, and ConcurrentResourcesUser::usableResources().
| ~iCubHandJointsSensor | ( | ) |
Destructor.
Definition at line 841 of file icubsensors.cpp.
Member Function Documentation
| void describe | ( | QString | type | ) | [static] |
Describe all the parameter for configuring the iCubHandJointsSensor.
Reimplemented from iCubSensor.
Definition at line 851 of file icubsensors.cpp.
References ParameterSettable::addTypeDescription(), ParameterSettable::EnumDescriptor::def(), ParameterSettable::Descriptor::describeEnum(), ParameterSettable::EnumDescriptor::help(), ParameterSettable::IsMandatory, ParameterSettable::EnumDescriptor::props(), and ParameterSettable::EnumDescriptor::values().
| void resourceChanged | ( | QString | resourceName, |
| ResourceChangeType | changeType | ||
| ) | [protected, virtual] |
The function called when a resource used here is changed.
- Parameters:
-
resourceName the name of the resource that has changed. chageType the type of change the resource has gone through (whether it was created, modified or deleted)
Reimplemented from iCubSensor.
Definition at line 886 of file icubsensors.cpp.
References iCubHandJointsSensor::icubHand, iCubHandJointsSensor::icubMotors, iCubSensor::icubResource, Logger::info(), PhyiCub::leftArmController(), Sensor::name(), iCubSensor::neuronsIteratorResource, NeuronsIterator::nextNeuron(), PhyiCub::rightArmController(), NeuronsIterator::setCurrentBlock(), and NeuronsIterator::setGraphicProperties().
| void save | ( | ConfigurationParameters & | params, |
| QString | prefix | ||
| ) | [virtual] |
Save the parameters of the iCubHandJointsSensor into the ConfigurationParameters.
- Parameters:
-
params is the ConfigurationParameters where save the parameters prefix is the path prefix for the parameters to save
Reimplemented from iCubSensor.
Definition at line 845 of file icubsensors.cpp.
References ConfigurationParameters::createParameter(), iCubHandJointsSensor::icubHand, and ConfigurationParameters::startObjectParameters().
| int size | ( | ) | [virtual] |
Return the number of neurons on which the Sensor will set the input: 7.
Implements Sensor.
Definition at line 882 of file icubsensors.cpp.
| void update | ( | ) | [virtual] |
Update the state of the Sensor every time step.
Implements Sensor.
Definition at line 857 of file icubsensors.cpp.
References Sensor::checkAllNeededResourcesExist(), MultiMotorController::getEncoder(), MultiMotorController::getLimits(), iCubHandJointsSensor::icubMotors, linearMap(), max(), min(), Sensor::name(), iCubSensor::neuronsIteratorResource, NeuronsIterator::nextNeuron(), NeuronsIterator::setCurrentBlock(), and NeuronsIterator::setInput().
Member Data Documentation
QString icubHand [protected] |
from which arm the joint's angles are read
Definition at line 529 of file icubsensors.h.
Referenced by iCubHandJointsSensor::iCubHandJointsSensor(), iCubHandJointsSensor::resourceChanged(), and iCubHandJointsSensor::save().
MultiMotorController* icubMotors [protected] |
the motor controller of the icub arm
Definition at line 531 of file icubsensors.h.
Referenced by iCubHandJointsSensor::resourceChanged(), and iCubHandJointsSensor::update().
The documentation for this class was generated from the following files:
- experiments/include/icubsensors.h
- experiments/src/icubsensors.cpp