MotorController Class. More...
Public Member Functions | |
| MotorController (World *world) | |
| constructor | |
| virtual | ~MotorController () |
| Destructor. | |
| bool | isEnabled () |
| return true is if enable (hence if it is on) | |
| void | setEnabled (bool b) |
| Enable/Disable this motorcontroller. | |
| virtual void | update ()=0 |
| virtual method implemented by actual motor controllers that apply the logic of controller | |
| World * | world () |
| return the world | |
 Public Member Functions inherited from Ownable Public Member Functions inherited from Ownable | |
| Ownable () | |
| Constructor. | |
| virtual | ~Ownable () |
| Destructor. | |
| const QList< Owned > & | owned () const |
| Returns the list of objects owned by this one. | |
| Ownable * | owner () const |
| Returns the owner of this object. | |
| void | setOwner (Ownable *owner, bool destroy=true) |
| Sets the owner of this object. | |
Additional Inherited Members | |
| Public Types inherited from Ownable | |
| typedef QList< Owned > | OwnedList |
| The type for the list of owned objects. | |
Detailed Description
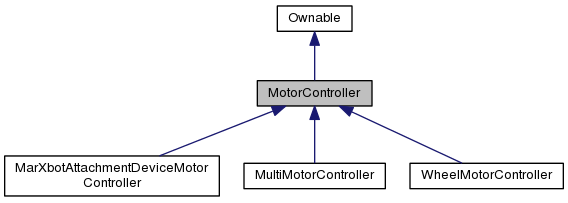
MotorController Class.
- Motivation
- Common interface among MotorController hierachy
- Description
- Warnings
- The world hasn't a list of motors, so they must be destroyed by the owner or by the creator
Definition at line 111 of file motorcontrollers.h.
Constructor & Destructor Documentation
| MotorController | ( | World * | world | ) |
constructor
- Parameters
-
world the world in which we live
Definition at line 147 of file motorcontrollers.cpp.
|
virtual |
Destructor.
Definition at line 152 of file motorcontrollers.cpp.
Member Function Documentation
|
inline |
return true is if enable (hence if it is on)
Definition at line 122 of file motorcontrollers.h.
Referenced by PhyMarXbot::preUpdate(), PhyKhepera::preUpdate(), PhyEpuck::preUpdate(), and PhyiCub::preUpdate().
|
inline |
Enable/Disable this motorcontroller.
Definition at line 126 of file motorcontrollers.h.
Referenced by PhyiCub::enableHead(), PhyiCub::enableLeftArm(), PhyiCub::enableLeftLeg(), PhyiCub::enableRightArm(), PhyiCub::enableRightLeg(), and PhyiCub::enableTorso().
|
pure virtual |
virtual method implemented by actual motor controllers that apply the logic of controller
Implemented in MarXbotAttachmentDeviceMotorController, WheelMotorController, and MultiMotorController.
|
inline |
return the world
Definition at line 130 of file motorcontrollers.h.
Referenced by MultiMotorController::update().
The documentation for this class was generated from the following files:
- worldsim/include/motorcontrollers.h
- worldsim/src/motorcontrollers.cpp