MarXbotWheelVelocityMotor Class Reference
The motor controlling the velocity of the wheels of the MarXbot. More...
Public Member Functions | |
| MarXbotWheelVelocityMotor (ConfigurationParameters ¶ms, QString prefix) | |
| Constructor. | |
| virtual | ~MarXbotWheelVelocityMotor () |
| Destructor. | |
| virtual void | save (ConfigurationParameters ¶ms, QString prefix) |
| Saves current parameters into the given ConfigurationParameters object. | |
| virtual int | size () |
| Returns the number of neurons required by this motor. | |
| virtual void | update () |
| Performs the motor update. This also modifies the activation of input neurons. | |
Static Public Member Functions | |
| static void | describe (QString type) |
| Generates a description of this class and its parameters. | |
Detailed Description
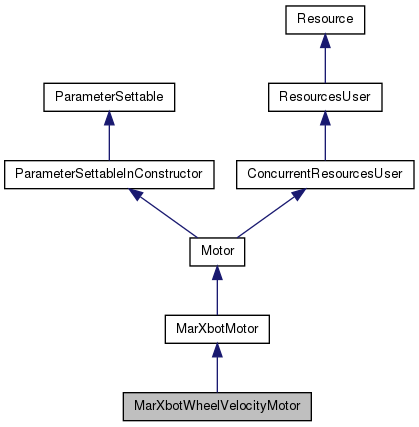
The motor controlling the velocity of the wheels of the MarXbot.
The motor controlling the velocity of the wheels of the MarXbot
This class does not add any other parameter to those defined by the parent class (MarXbotMotor)
The resources required by this Motor are the same as those of the parent class
Definition at line 124 of file marxbotmotors.h.
Constructor & Destructor Documentation
| MarXbotWheelVelocityMotor | ( | ConfigurationParameters & | params, |
| QString | prefix | ||
| ) |
Constructor.
Creates and configures the motor
- Parameters:
-
params the ConfigurationParameters containing the parameters prefix the path prefix to the paramters for this Sensor
Definition at line 83 of file marxbotmotors.cpp.
| ~MarXbotWheelVelocityMotor | ( | ) | [virtual] |
Destructor.
Definition at line 90 of file marxbotmotors.cpp.
Member Function Documentation
| void describe | ( | QString | type | ) | [static] |
Generates a description of this class and its parameters.
- Parameters:
-
type the string representation of this class name
Reimplemented from MarXbotMotor.
Definition at line 104 of file marxbotmotors.cpp.
References ParameterSettable::addTypeDescription().
| void save | ( | ConfigurationParameters & | params, |
| QString | prefix | ||
| ) | [virtual] |
Saves current parameters into the given ConfigurationParameters object.
- Parameters:
-
params the ConfigurationParameters object in which parameters should be saved prefix the name and path of the group where to save parametrs
Reimplemented from MarXbotMotor.
Definition at line 95 of file marxbotmotors.cpp.
References ConfigurationParameters::startObjectParameters().
| int size | ( | ) | [virtual] |
Returns the number of neurons required by this motor.
- Returns:
- the number of neurons required by this motor
Implements Motor.
Definition at line 137 of file marxbotmotors.cpp.
| void update | ( | ) | [virtual] |
Performs the motor update. This also modifies the activation of input neurons.
Implements Motor.
Definition at line 113 of file marxbotmotors.cpp.
References Motor::checkAllNeededResourcesExist(), NeuronsIterator::getOutput(), WheelMotorController::getSpeedLimits(), Motor::name(), NeuronsIterator::nextNeuron(), NeuronsIterator::setCurrentBlock(), WheelMotorController::setSpeeds(), and PhyMarXbot::wheelsController().
The documentation for this class was generated from the following files:
- experiments/include/marxbotmotors.h
- experiments/src/marxbotmotors.cpp