Motor Class Reference
The base abstract class for the Motor hierarchy. More...
Public Member Functions | |
| Motor (ConfigurationParameters ¶ms, QString prefix) | |
| Constructor and Configure. | |
| ~Motor () | |
| Destructor. | |
| QString | name () |
| Return the name of the Sensor. | |
| void | save (ConfigurationParameters ¶ms, QString prefix) |
| Save the parameters into the ConfigurationParameters. | |
| void | setName (QString name) |
| Use this method for changing the name of the Sensor. | |
| virtual int | size ()=0 |
| Return the number of neurons from which the Motor will get the output. | |
| virtual void | update ()=0 |
| Update the state of the Motor every time step; the actual behaviour is implemented in subclasses. | |
Static Public Member Functions | |
| static void | describe (QString type) |
| Describe all the parameter for configuring the Motor. | |
Protected Member Functions | |
| void | checkAllNeededResourcesExist () |
| Checks whether all resources we need are existing and throws an exception if they aren't. | |
| void | resetNeededResourcesCheck () |
| Resets the check on needed resources so that the next call to checkAllNeededResourcesExist() will perform the full check and not the quick one. | |
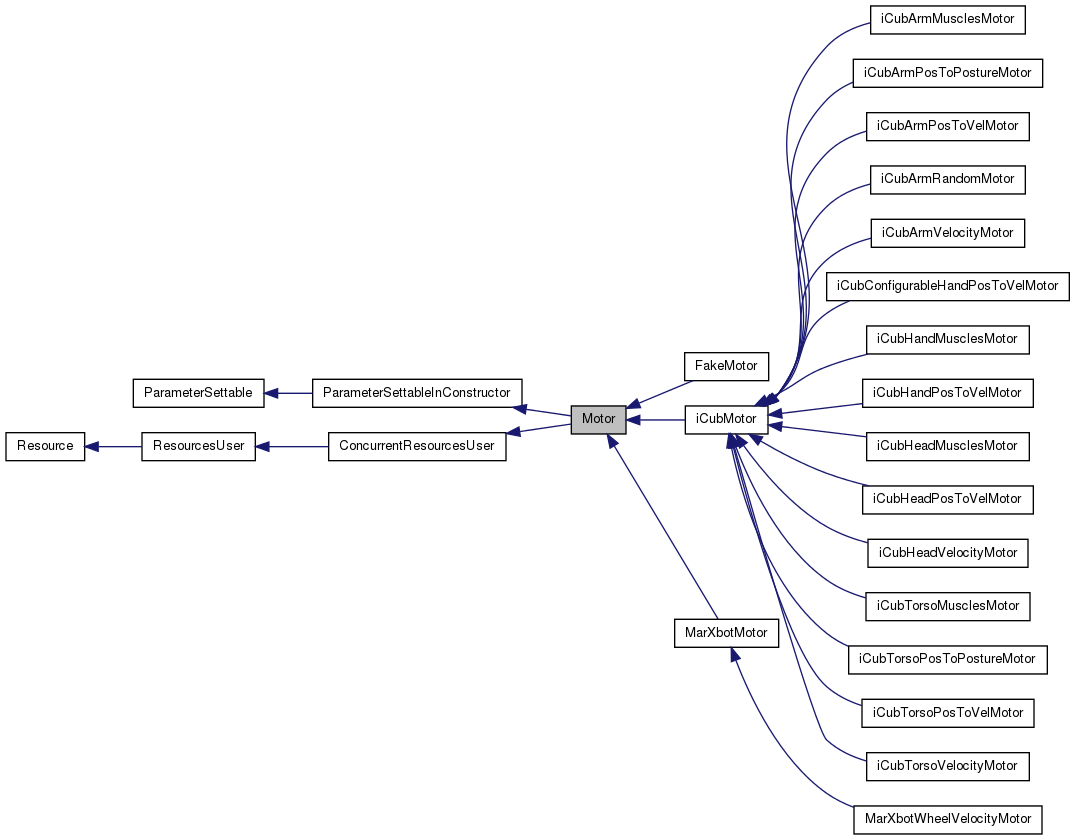
Detailed Description
The base abstract class for the Motor hierarchy.
A Motor is an object that read data from the neural network and put that data into a resource converting it into the appropriate way In child class implement also the resourceChanged() function to get notified of resources creation/modification
Definition at line 152 of file neuroninterfaces.h.
Constructor & Destructor Documentation
| Motor | ( | ConfigurationParameters & | params, |
| QString | prefix | ||
| ) |
Constructor and Configure.
- Parameters:
-
params is the ConfigurationParameters containing the parameters prefix is the path prefix to the paramters for this Motor
Definition at line 82 of file neuroninterfaces.cpp.
References ConfigurationHelper::getString(), and Motor::setName().
| ~Motor | ( | ) |
Destructor.
Definition at line 89 of file neuroninterfaces.cpp.
Member Function Documentation
| void checkAllNeededResourcesExist | ( | ) | [protected] |
Checks whether all resources we need are existing and throws an exception if they aren't.
The result of the check is stored, so subsequent calls to this functions are quick (unless you call resetNeededResourcesCheck(), see that function description)
Definition at line 114 of file neuroninterfaces.cpp.
References ConfigurationHelper::throwUserMissingResourceError(), and ConcurrentResourcesUser::usedResourcesExist().
Referenced by FakeMotor::update(), MarXbotWheelVelocityMotor::update(), iCubTorsoVelocityMotor::update(), iCubArmVelocityMotor::update(), iCubConfigurableHandPosToVelMotor::update(), iCubHeadVelocityMotor::update(), iCubHandPosToVelMotor::update(), iCubHeadPosToVelMotor::update(), iCubTorsoPosToVelMotor::update(), iCubArmPosToVelMotor::update(), iCubHeadMusclesMotor::update(), iCubTorsoMusclesMotor::update(), iCubHandMusclesMotor::update(), iCubArmMusclesMotor::update(), iCubTorsoPosToPostureMotor::update(), iCubArmPosToPostureMotor::update(), and iCubArmRandomMotor::update().
| void describe | ( | QString | type | ) | [static] |
Describe all the parameter for configuring the Motor.
Reimplemented from ParameterSettable.
Reimplemented in iCubMotor, iCubArmRandomMotor, iCubArmPosToPostureMotor, iCubTorsoPosToPostureMotor, iCubArmMusclesMotor, iCubHandMusclesMotor, iCubTorsoMusclesMotor, iCubHeadMusclesMotor, iCubArmPosToVelMotor, iCubTorsoPosToVelMotor, iCubHeadPosToVelMotor, iCubHandPosToVelMotor, iCubConfigurableHandPosToVelMotor, iCubHeadVelocityMotor, iCubArmVelocityMotor, iCubTorsoVelocityMotor, MarXbotMotor, MarXbotWheelVelocityMotor, and FakeMotor.
Definition at line 101 of file neuroninterfaces.cpp.
References ParameterSettable::addTypeDescription(), ParameterSettable::Descriptor::describeString(), and ParameterSettable::StringDescriptor::help().
| QString name | ( | ) |
Return the name of the Sensor.
Typically, it is the name of the subclass
Definition at line 106 of file neuroninterfaces.cpp.
Referenced by EvoRobotExperiment::configure(), EvoRobotExperiment::recreateNeuralNetwork(), FakeMotor::resourceChanged(), iCubTorsoVelocityMotor::resourceChanged(), iCubArmVelocityMotor::resourceChanged(), iCubHandPosToVelMotor::resourceChanged(), iCubHeadPosToVelMotor::resourceChanged(), iCubTorsoPosToVelMotor::resourceChanged(), iCubArmPosToVelMotor::resourceChanged(), iCubHeadMusclesMotor::resourceChanged(), iCubTorsoMusclesMotor::resourceChanged(), iCubHandMusclesMotor::resourceChanged(), iCubArmMusclesMotor::resourceChanged(), iCubTorsoPosToPostureMotor::resourceChanged(), iCubArmPosToPostureMotor::resourceChanged(), iCubArmRandomMotor::resourceChanged(), Motor::setName(), MarXbotWheelVelocityMotor::update(), iCubTorsoVelocityMotor::update(), iCubArmVelocityMotor::update(), iCubConfigurableHandPosToVelMotor::update(), iCubHeadVelocityMotor::update(), iCubHandPosToVelMotor::update(), iCubHeadPosToVelMotor::update(), iCubTorsoPosToVelMotor::update(), iCubArmPosToVelMotor::update(), iCubHeadMusclesMotor::update(), iCubTorsoMusclesMotor::update(), iCubHandMusclesMotor::update(), iCubArmMusclesMotor::update(), iCubTorsoPosToPostureMotor::update(), and iCubArmPosToPostureMotor::update().
| void resetNeededResourcesCheck | ( | ) | [protected] |
Resets the check on needed resources so that the next call to checkAllNeededResourcesExist() will perform the full check and not the quick one.
Call this if you get notified that a resource has been deleted so that we can check if it is available again when you need it
Definition at line 129 of file neuroninterfaces.cpp.
Referenced by FakeMotor::resourceChanged(), MarXbotMotor::resourceChanged(), and iCubMotor::resourceChanged().
| void save | ( | ConfigurationParameters & | params, |
| QString | prefix | ||
| ) | [virtual] |
Save the parameters into the ConfigurationParameters.
- Parameters:
-
params is the ConfigurationParameters where save the parameters prefix is the path prefix for the parameters to save
Implements ParameterSettable.
Reimplemented in iCubMotor, iCubArmRandomMotor, iCubArmPosToPostureMotor, iCubTorsoPosToPostureMotor, iCubArmMusclesMotor, iCubHandMusclesMotor, iCubTorsoMusclesMotor, iCubHeadMusclesMotor, iCubArmPosToVelMotor, iCubTorsoPosToVelMotor, iCubHeadPosToVelMotor, iCubHandPosToVelMotor, iCubConfigurableHandPosToVelMotor, iCubHeadVelocityMotor, iCubArmVelocityMotor, iCubTorsoVelocityMotor, MarXbotMotor, MarXbotWheelVelocityMotor, and FakeMotor.
Definition at line 92 of file neuroninterfaces.cpp.
References ConfigurationParameters::createParameter(), and ConfigurationParameters::startObjectParameters().
| void setName | ( | QString | name | ) |
Use this method for changing the name of the Sensor.
Definition at line 110 of file neuroninterfaces.cpp.
References Motor::name().
Referenced by EvoRobotExperiment::configure(), and Motor::Motor().
| virtual int size | ( | ) | [pure virtual] |
Return the number of neurons from which the Motor will get the output.
- Warning:
- this method has to be called in any situation; when re-implement it does not rely on conditions/variables available only after the initilization because this method might be called before the Motor initialization
Implemented in iCubArmRandomMotor, iCubArmPosToPostureMotor, iCubTorsoPosToPostureMotor, iCubArmMusclesMotor, iCubHandMusclesMotor, iCubTorsoMusclesMotor, iCubHeadMusclesMotor, iCubArmPosToVelMotor, iCubTorsoPosToVelMotor, iCubHeadPosToVelMotor, iCubHandPosToVelMotor, iCubConfigurableHandPosToVelMotor, iCubHeadVelocityMotor, iCubArmVelocityMotor, iCubTorsoVelocityMotor, MarXbotWheelVelocityMotor, and FakeMotor.
Referenced by EvoRobotExperiment::recreateNeuralNetwork().
| virtual void update | ( | ) | [pure virtual] |
Update the state of the Motor every time step; the actual behaviour is implemented in subclasses.
Implemented in iCubArmRandomMotor, iCubArmPosToPostureMotor, iCubTorsoPosToPostureMotor, iCubArmMusclesMotor, iCubHandMusclesMotor, iCubTorsoMusclesMotor, iCubHeadMusclesMotor, iCubArmPosToVelMotor, iCubTorsoPosToVelMotor, iCubHeadPosToVelMotor, iCubHandPosToVelMotor, iCubConfigurableHandPosToVelMotor, iCubHeadVelocityMotor, iCubArmVelocityMotor, iCubTorsoVelocityMotor, MarXbotWheelVelocityMotor, and FakeMotor.
The documentation for this class was generated from the following files:
- experiments/include/neuroninterfaces.h
- experiments/src/neuroninterfaces.cpp