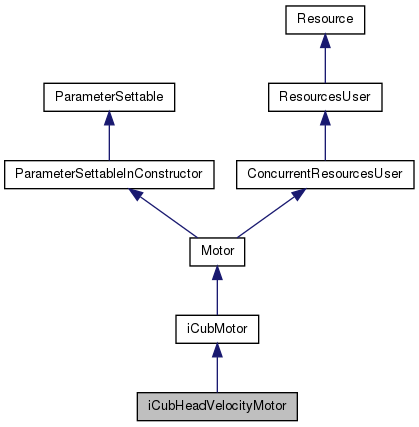
iCubHeadVelocityMotor Class Reference
A motor moving the head of the iCub at the given velocity. More...
Public Member Functions | |
| iCubHeadVelocityMotor (ConfigurationParameters ¶ms, QString prefix) | |
| Constructor. | |
| ~iCubHeadVelocityMotor () | |
| Destructor. | |
| virtual void | save (ConfigurationParameters ¶ms, QString prefix) |
| Saves current parameters into the given ConfigurationParameters object. | |
| virtual int | size () |
| Returns the number of neurons required by this motor. | |
| virtual void | update () |
| Performs the motor update. This also reads the activation of output neurons. | |
Static Public Member Functions | |
| static void | describe (QString type) |
| Generates a description of this class and its parameters. | |
Detailed Description
A motor moving the head of the iCub at the given velocity.
The motor to move the head of the icub at the given velocity. This controls two degrees of freedom: pan (head joint 2) and tilt (head joint 0). We need two output neurons whose activation is in the range [0.0, 1.0]
In addition to all parameters defined by the parent class (Motor), this class also defines the following parameters:
- icub: the name of the resource associated with the iCub robot to use
The resources required by this Motor are:
- evonetIterator: the object to iterate over neurons of the neural network
- robot: the simulated physical iCub robot
Definition at line 716 of file icubmotors.h.
Constructor & Destructor Documentation
| iCubHeadVelocityMotor | ( | ConfigurationParameters & | params, |
| QString | prefix | ||
| ) |
Constructor.
Creates and configures the motor
- Parameters:
-
params the ConfigurationParameters containing the parameters prefix the path prefix to the paramters for this Sensor
Definition at line 1106 of file icubmotors.cpp.
References iCubMotor::icubResource, iCubMotor::neuronsIteratorResource, and ConcurrentResourcesUser::usableResources().
Destructor.
Definition at line 1114 of file icubmotors.cpp.
Member Function Documentation
| void describe | ( | QString | type | ) | [static] |
Generates a description of this class and its parameters.
- Parameters:
-
type the string representation of this class name
Reimplemented from iCubMotor.
Definition at line 1124 of file icubmotors.cpp.
References ParameterSettable::addTypeDescription().
| void save | ( | ConfigurationParameters & | params, |
| QString | prefix | ||
| ) | [virtual] |
Saves current parameters into the given ConfigurationParameters object.
- Parameters:
-
params the ConfigurationParameters object in which parameters should be saved prefix the name and path of the group where to save parametrs
Reimplemented from iCubMotor.
Definition at line 1118 of file icubmotors.cpp.
References ConfigurationParameters::startObjectParameters().
| int size | ( | ) | [virtual] |
Returns the number of neurons required by this motor.
- Returns:
- the number of neurons required by this motor
Implements Motor.
Definition at line 1156 of file icubmotors.cpp.
| void update | ( | ) | [virtual] |
Performs the motor update. This also reads the activation of output neurons.
Implements Motor.
Definition at line 1130 of file icubmotors.cpp.
References Motor::checkAllNeededResourcesExist(), NeuronsIterator::getOutput(), Motor::name(), iCubMotor::neuronsIteratorResource, NeuronsIterator::nextNeuron(), NeuronsIterator::setCurrentBlock(), and MultiMotorController::velocityMove().
The documentation for this class was generated from the following files:
- experiments/include/icubmotors.h
- experiments/src/icubmotors.cpp