iCubRobot Class Reference
The class modelling the iCub robot. More...
Public Member Functions | |
| iCubRobot (ConfigurationParameters ¶ms, QString prefix) | |
| Constructor. | |
| virtual | ~iCubRobot () |
| Destructor. | |
| virtual void | save (ConfigurationParameters ¶ms, QString prefix) |
| Saves the actual status of parameters into the ConfigurationParameters object passed. | |
Static Public Member Functions | |
| static void | describe (QString type) |
| Add to Factory::typeDescriptions() the descriptions of all parameters and subgroups. | |
Detailed Description
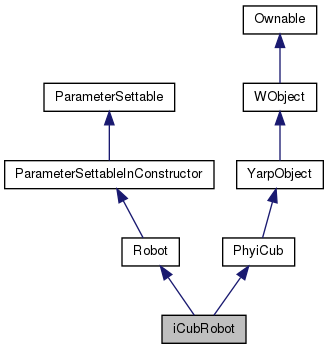
The class modelling the iCub robot.
This inherits from PhyiCub, so you can use all its methods
Constructor & Destructor Documentation
| iCubRobot | ( | ConfigurationParameters & | params, |
| QString | prefix | ||
| ) |
Constructor.
- Parameters:
-
params the configuration parameters object with parameters to use prefix the prefix to use to access the object configuration parameters. This is guaranteed to end with the separator character when called by the factory, so you don't need to add one
Definition at line 92 of file robots.cpp.
References PhyiCub::blockTorso0(), PhyiCub::configurePosture(), PhyiCub::doKinematicSimulation(), PhyiCub::enableCameras(), PhyiCub::enableHead(), PhyiCub::enableLeftArm(), PhyiCub::enableLeftKinematicHand(), PhyiCub::enableLeftLeg(), PhyiCub::enableRightArm(), PhyiCub::enableRightKinematicHand(), PhyiCub::enableRightLeg(), PhyiCub::enableTorso(), ConfigurationHelper::getBool(), ConfigurationHelper::getDouble(), and ConfigurationHelper::hasParameter().
| ~iCubRobot | ( | ) | [virtual] |
Destructor.
Definition at line 431 of file robots.cpp.
Member Function Documentation
| void describe | ( | QString | type | ) | [static] |
Add to Factory::typeDescriptions() the descriptions of all parameters and subgroups.
- Parameters:
-
type is the name of the type regarding the description. The type is used when a subclass reuse the description of its parent calling the parent describe method passing the type of the subclass. In this way, the result of the method describe of the parent will be the addition of the description of the parameters of the parent class into the type of the subclass
Reimplemented from ParameterSettable.
Definition at line 286 of file robots.cpp.
References ParameterSettable::addTypeDescription(), ParameterSettable::RealDescriptor::def(), ParameterSettable::BoolDescriptor::def(), ParameterSettable::StringDescriptor::def(), ParameterSettable::Descriptor::describeBool(), ParameterSettable::Descriptor::describeReal(), ParameterSettable::Descriptor::describeString(), ParameterSettable::RealDescriptor::help(), ParameterSettable::BoolDescriptor::help(), and ParameterSettable::StringDescriptor::help().
| void save | ( | ConfigurationParameters & | params, |
| QString | prefix | ||
| ) | [virtual] |
Saves the actual status of parameters into the ConfigurationParameters object passed.
This is not implemented, calling this causes an abort
- Parameters:
-
params the configuration parameters object on which save actual parameters prefix the prefix to use to access the object configuration parameters.
Implements ParameterSettable.
Definition at line 280 of file robots.cpp.
References Logger::error().
The documentation for this class was generated from the following files:
- experiments/include/robots.h
- experiments/src/robots.cpp