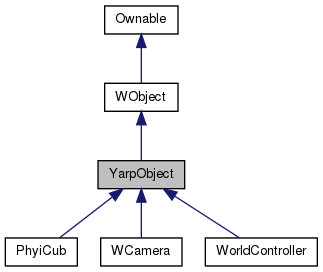
YarpObject Class Reference
YarpObject class. More...
Public Member Functions | |
| YarpObject (World *world, QString name, const wMatrix &tm=wMatrix::identity()) | |
| Create a YarpObject; The name is mandatory because it is used as root name for each devices of this object. | |
| virtual | ~YarpObject () |
| Destroy the YarpObject. | |
| yarp::dev::PolyDriver * | polydriver (QString name) |
| return the PolyDriver with the given name associated to it | |
Protected Member Functions | |
| void | registerServerControlBoard (yarp::dev::DeviceDriver *device, QString devicename) |
| Add a DeviceDriver to the map of controllers It automatically construct a ServerControlBoard, the port name for accessing the DeviceDriver will be /worldname/yarpobjectname/devicename. | |
| void | registerServerFrameGrabber (yarp::dev::DeviceDriver *device, QString devicename) |
| Add a DeviceDriver to the map of controllers It automatically construct a ServerFrameGrabber, the port name for accessing the DeviceDriver will be /worldname/yarpobjectname/devicename. | |
| void | removeServerControlBoard (QString devicename) |
| Remove, and close the serverControlBoard registered and opened by above call. | |
Detailed Description
YarpObject class.
\
- Motivation
- This object represent a Yarped Object, and it's a kind of bridge between World and Yarp
- Description
- Warnings
- Warnings
Definition at line 63 of file yarpobject.h.
Constructor & Destructor Documentation
| YarpObject | ( | World * | world, |
| QString | name, | ||
| const wMatrix & | tm = wMatrix::identity() |
||
| ) |
Create a YarpObject; The name is mandatory because it is used as root name for each devices of this object.
Definition at line 71 of file yarpobject.cpp.
| ~YarpObject | ( | ) | [virtual] |
Destroy the YarpObject.
Definition at line 76 of file yarpobject.cpp.
Member Function Documentation
| yarp::dev::PolyDriver* polydriver | ( | QString | name | ) | [inline] |
return the PolyDriver with the given name associated to it
Definition at line 72 of file yarpobject.h.
Referenced by PhyiCub::enableRightArmCartesianController().
| void registerServerControlBoard | ( | yarp::dev::DeviceDriver * | device, |
| QString | devicename | ||
| ) | [protected] |
Add a DeviceDriver to the map of controllers
It automatically construct a ServerControlBoard, the port name for accessing the DeviceDriver will be /worldname/yarpobjectname/devicename.
Definition at line 80 of file yarpobject.cpp.
References WObject::name(), and WObject::world().
Referenced by PhyiCub::PhyiCub().
| void registerServerFrameGrabber | ( | yarp::dev::DeviceDriver * | device, |
| QString | devicename | ||
| ) | [protected] |
Add a DeviceDriver to the map of controllers
It automatically construct a ServerFrameGrabber, the port name for accessing the DeviceDriver will be /worldname/yarpobjectname/devicename.
Definition at line 101 of file yarpobject.cpp.
References WObject::name(), and WObject::world().
| void removeServerControlBoard | ( | QString | devicename | ) | [protected] |
Remove, and close the serverControlBoard registered and opened by above call.
Definition at line 91 of file yarpobject.cpp.
References WObject::name(), and WObject::world().
Referenced by PhyiCub::~PhyiCub().
The documentation for this class was generated from the following files:
- worldsim/include/yarpobject.h
- worldsim/src/yarpobject.cpp