Laboratory of Autonomous Robotics and Artificial Life |
 |
|
Institute of Cognitive Sciences and Technologies, CNR |
||
Evolving Emergent Behaviours
Stefano Nolfi
Laboratory of Autonomous Robots and Artificial Life (LARAL)
Institute of Cognitive Sciences and Technologies (CNR)
Roma, Italy
Abstract
In this document we review a simple experiment that illustrates how evolving robots can discover and display emergent behaviors.
1. Introduction
Behavior is a dynamical process resulting from nonlinear interactions (occurring at a fast time rate) between the agent's control system, its body, and the environment). At any time step, the environment and the agent-environment relation influence the body and the motor reaction of the agent, which in turn influences the environment and/or the agent--environmental relation. Sequences of these interactions lead to a dynamical process where the contributions of the different aspects (i.e. the robot's control system, the robot's body, and the environment) cannot be separated. This implies that even complete knowledge of the elements governing the interactions provides little insight into the behavior emerging from these interactions (Marturana and Varela, 1980, Beer 1995, Nolfi, 2009).
An interesting property of evolutionary robotics (Nolfi and Floreano, 2000) is that it can enable to synthesize robots displaying a certain behavioural capacity without specifying the manner in which such capacity should be realized and/or the combination of elementary behaviours that should be produced and combined to achieve the desired overall capacity. This allows the evolving robots to discover and exploit behaviours that emerge from the interactions between the robot control system, the robot body and the environment and/or from the interaction between previously developed behavioural capacities (Nolfi, 2009). The synthesis and exploitation of emergent properties, in turn, often allows evolving robots to discover solutions that rely on relatively parsimonious control policy and/or body structures.
2. Experimental scenario
For an example of how evolving robots can solve an adaptive task on the basis of a simple control policy thanks to the possibility to exploit properties emerging from the agent/environmental interactions, let us consider the case of a Khepera robot placed in an arena surrounded by walls (see Video 1) that should evolve an ability to forage by finding and remaining close to a food object (i.e. a cylindrical object) (Nolfi, 1996, 2002)
Video 1. A Khepera robot situated in a rectangular arena surrounded by walls and containing a cilyndrical object placed in a random selected location. The robots' gripper is not controlled in this experiment. The video shows in sequence the behavior of two robots evolved for the ability to find and remaining close to the cylinder.
The robot is provided with eight infrared sensors and two motors controlling the desired speed of the two corresponding wheels. From the point of view of an external observer, solving this problem requires robots able to: (i)explore the environment until an obstacle is detected, (ii) discriminate whether the obstacle detected is a wall or a cylindrical object, and (iii) approach or avoid the object depending on the object type.
A detailed analysis of the sensory patterns experienced by the robot indicated that the task of discriminating the two objects is far from trivial since the two classes of sensory patterns experienced by robots close to a wall and close to cylindrical objects overlap significantly (Nolfi, 1996, 2002). However, robots evolved for the ability to solve this task resorted to a strategy that does not require explicit discrimination of the two types of objects (Nolfi, 2002).
3. Results
In all replications of the experiment, the evolved robot moved away from walls, but when they encountered the food object tended to oscillate back and forth or left and right in its proximity (see Video 1). This solution consists of producing a behavioral attractor near the cylindrical object. A behavioral attractor is a series of sensorimotor sequences that maintain the robot close to the object. In this case, the forward movement in front of the cylindrical object generates a variation of the sensory pattern experienced by the robot that, in turn, triggers a backward movement (see Figure 1).
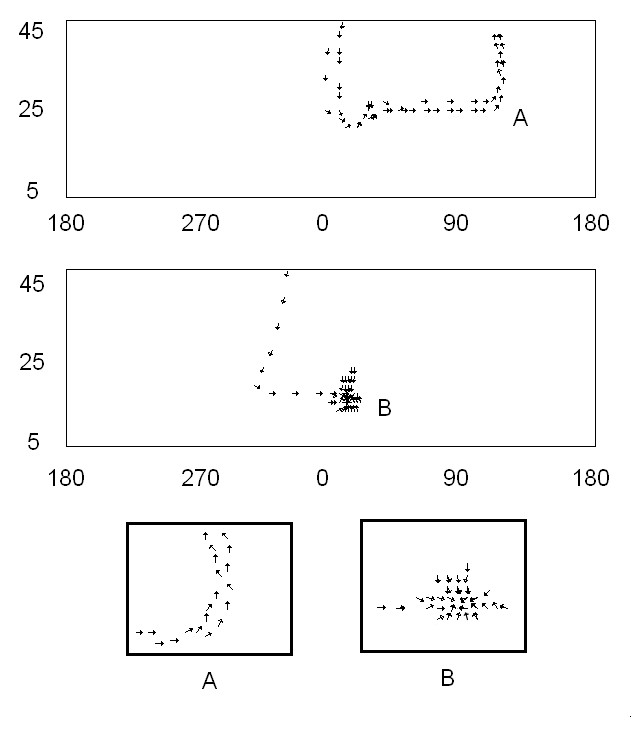
Figure 1. Angular trajectories of an evolved robot close to a wall and to a cylinder (left and right, respectively). The x and y axis indicate the relative orientation (from -180 to 180 degrees) and distance (from 0 to 45mm) between the robot and the wall or the cylindrical object. The bottom picture shows a zoomed version of part of the above pictures. The data were obtained by placing the robot at a~random position in the environment,leaving it free to move for 500 cycles, and recording its relative movements with respect to the two types of objects for distances smaller than 45mm. For sake of clarity, arrows are used to indicate the relative direction, but not the amplitude of movements.
Therefore, evolved robots do not solve the problem by discriminating the two type of objects (cylinder and wall) and displaying an approaching or avoiding behavior, but rather exploit behaviors that emerge from the interaction between the robot's control system, the robots' body, and the environment. The possibility to discover and rely on these forms of emergent behavior allows evolving robots to find computationally simple solutions to apparently complex problems. Indeed, the foraging task described above can be solved by Khepera robot provided with a simple reactive controller constituted by a feedforward neural network with eight sensory neurons that encode the state of the corresponding infrared sensors directly connected to two motor neurons that set the desired speed of the two wheels.
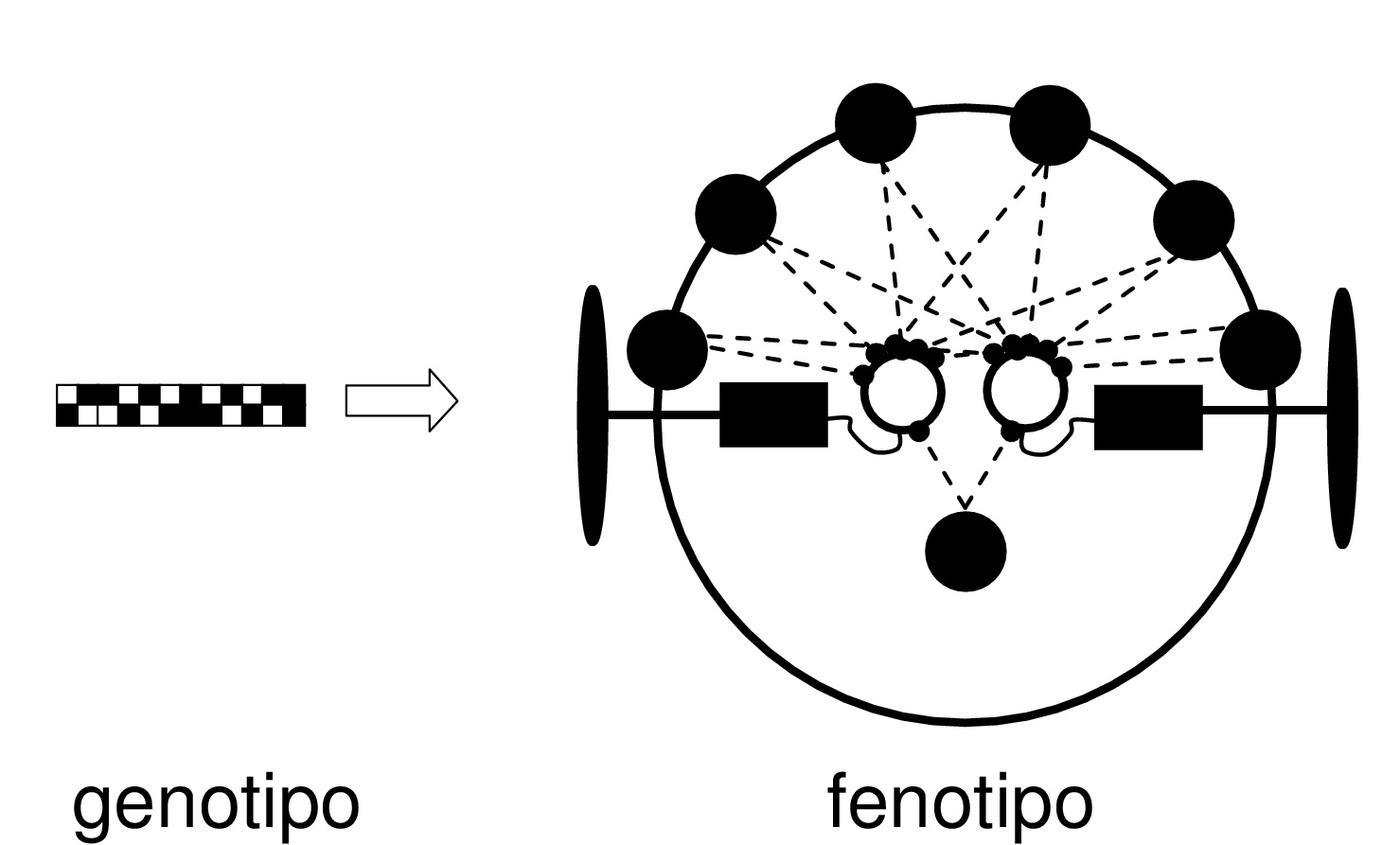
Figure 2. The architecture of the neural controller and the genotype-to-phenotype mapping. The robot is provided with a neural network controller with six sensory neurons (that encode the state of the six corresponding frontal infrared sensors) directly connected to two motor neurons (that control the desired speed of the robot's wheels). The architecture of the neural network is fixed. The connection weights of the neural networks are genetically encoded and evolved.
More specifically, the overall behavior exhibited by the robot results from sequences of interactions between the robot and the environment mediated by four classes of simple control rules that consists in: (1) moving forward when the infrared sensors are not activated, (2) turning left when the right infrared sensors are activated, (3) turning right when the left infrared sensors are activated, (4) moving backward when the frontal infrared sensors are activated. Notice however that within this simple control policies quantitative aspects, such as how much the robot turn left when the right infrared sensors are activated, crucially matters.
To understand how these simple control rules can produce all the required behaviours we should consider that the same motor reactions produce different effects in different agent/environmental situations which in turn then trigger different motor reactions. Indeed, as we have seen above, overall the robot/environmental interactions occurring near a wall produce an obstacle avoidance behaviour while the interactions occurring near a cylinder produce a behavioural attractor that maintains the robot near the cylinder.
The required behaviour thus emerges from the interaction between the robot and the environment mediated by simple control rules.
References
Beer R.B. (1995). A dynamical systems perspective on agent-environment interaction, Artificial Intelligence 72: 173-215.
Maturana H.R. and Varela F.J. (1980). Autopoiesis and Cognition: The Realization of the Living. Dordrecht: Reidel.
Nolfi S. (1996). Adaptation as a more powerful tool than decomposition and integration. In: T.Fogarty and G.Venturini (Eds.), Proceedings of the Workshop on Evolutionary Computing and Machine Learning, 13th International Conference on Machine Learning, University of Bari, Italy.
Nolfi S. (2002). Power and limits of reactive agents. Neurocomputing, 49:119-145.
Nolfi S. (2009). Behavior and cognition as a complex adaptive system: Insights from robotic experiments. In C Hooker (Ed.), Handbook of the Philosophy of Science. Volume 10: Philosophy of Complex Systems. Elsevier
Nolfi S. & Floreano D. (2000). Evolutionary Robotics: The Biology, Intelligence, and Technology of Self-Organizing Machines. Cambridge, MA: MIT Press/Bradford Books.