
Evolution of Communication in Groups of Mobile Robots
Joachim de Greeff, Davide Marocco, Stefano Nolfi
1. Objective
During the last ten years, the attempt to study the evolution of communication and language through computational and robotic models has attracted the attention of an increasing number of researchers (Nolfi & Mirolli, in press). Indeed, the study of how populations of artificial agents which are embodied and situated can autonomously develop communication skills and a communication system while they interact with a physical and social environment, presents two important advantages with respect to experimental methods: (a) it allows to study how communication signals are grounded in agents' non-symbolic sensory-motor experiences, and (b) it allows to come up with precise and operational models of how communication skills can originate and of how established communication systems can evolve and adapt to variations of the physical and social environment.
Existing models of the evolution of communication in agents which are embodied and situated often focus on specific aspects, such as: (i) how a shared vocabulary can emerge in a population of agents which interact on the basis of a pre-determined interaction protocol, (ii) how a simple unstructured communication system can evolve into a structured communication system, (iii) how a given communication system can be acquired and eventually transmitted socially. In the work summarized in this document, instead, we focus on the more fundamental question of how a population of initially non-communicating robots might develop communication skills which are functional with respect to the task that the robots have to perform without being rewarded for communicating
More precisely, we devised an experimental scenario which is simple enough to be analysed systematically but which at the same time includes all the elements which are necessary to investigate important questions concerning the evolution of communication such as: which are the conditions that might lead to the evolution of communication skills in a population of initially non-communicating individuals? What is the relation between agents' communicative and non-communicative behaviours and between different communication modalities (e.g. implicit and explicit communication)? How does the 'meaning' of signals originate and evolve and how is it grounded in agents' sensory experience?
The data collected through these synthetic experiments represents important evidence when we consider the paucity of empirical data on the evolution of animal and human communication. This shortage of empirical data is due to the impossibility to analyse the evolutionary process in action and the difficulty to reconstruct it from indirect evidence because communication and language do not leave traces in fossil records.
2. Method
To address this objective we investigated whether and how groups of mobile robots, evolved for the ability to carry on a cooperative task, develop the ability to communicate (without being rewarded for the ability to produce signals and/or to react to detected signals). The robots are provided with sensors that allow them to detect information from their physical and social environment and with actuators that allow them to move and to produce signals (e.g. sounds of varying frequency) that can be detected by the other robots. Moreover, the robots are provided with a neural controller with a fixed architecture.
The connection weights of the robots' neural controller and the time constant of the neural controller's internal neurons, that determine how the robot react to the current and previously experienced sensory states, represent the free parameters of the system. These parameters are initially set randomly and are adapted through an artificial evolutionary process (Nolfi and Floreano, 2000).
This implies that the motor and communicative behaviours exhibited by the robots are not pre-determined since the way in which a robot reacts to any given sensory state or sequence of sensory states depends on the free parameters which are encoded in the genome of the population and are subjected to variation. More specifically, concerning robots' motor behaviour, the robots are free to determine the number and the type of elementary behaviours that they display and the way in which these behaviours are combined and arbitrated. Concerning robots' communicative behaviours, evolving robots are left free to determine how they will collect the information which has a communicative value from the physical and social environment, how many different signals they will produce, in which agent/environmental context each signal will be produced, and which will be the motor and communicative effects of the explicit and implicit signals detected. Finally, evolving robots are free to co-adapt their motor and communicative behaviours (Nolfi, 2005).
3. Summary of the main results
The analysis of the results obtained in different set of experiments demonstrates that indeed the evolving robots develop their own communication systems (i.e. their own 'language') and use it to solve their adaptive problem.
The analysis of the best replication of the experiment indicates that evolved robots display rather rich behavioural and communication skills, including: (1) an ability to access/generate information which has a communicative value, (2) an ability to produce different signals encoding useful information, (3) the ability to react appropriately to explicit and implicit signals, by also regulating the reaction on the basis of the context in which signals are detected, (4) an ability to rely on different communication modalities depending on the circumstances.
The analysis of the evolutionary process of the best replications indicates how signals/meanings originate and how robots behavioural and communication skills progressively complexify by producing an incremental process in which previously developed skills often create the adaptive conditions for the development of higher-level skills that base themselves on previously developed skills. The fact that the new skills are based on previously developed skills, in turn, leads to the creation of a chain of dependencies that ensure that previously developed skills tend to be preserved. Interesting this process also implies that the signals used by evolved robots are not simply grounded in (or based on) robots' sensory-motor states but also robots' behavioural skills.
4. Evolution and progressive complexification of behavioural and communication skills
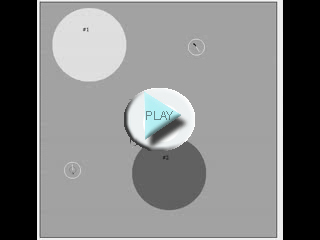
In a first series of experiments (De Greeff and Nolfi, in press) we carried a series of experiments in which team composed by 2 robots are evolved for the ability to produce a coordinated behaviour which consists in being concurrently located in the two target areas (the black and white circles) and to switch areas as quickly as possible (see Figure 1).
4.1 The experimental setup

Figure 1. Left: The environment and the robots. The two circular areas of the environment coloured in black and white represent the two target areas. Right: The e-puck robotic platform including the ground sensory board and a stripe of red paper around the top part of the body.
The two robots (Figure 1) are provided with eight infrared sensors which allow them to detect obstacles, four ground sensors which allow them to detect the colour of the ground below the robot, 3 vision sensors that allows the robots to detect the relative position of the other robot when it is located in view angle of the camera, and two signal sensors that detect the signal produced by the robots (signals are encoded as floating point numbervarying in the range [0.0, 1.0] transmitted through a radio connection). The robots are also provided with two motor actuator that determine the desired speed of the two motors controlling the two corresponding wheels and with a signal actuator that determines the value of the signal produced (that is transmitted through the radio connection to the other robot). The robots' neural controllers are provided with 17 sensory neurons that encode the state of the corresponding sensors, four internal neurons with recurrect connections (costituted by leaky integrators), and 3 motor neurons that determine the state of the corresponding actuators (Figure 2).
The possibility of robots to affect each other through different communication modalities (i.e. radio, vision, and infrared) allows the robots to potentially develop different types of communication skills. In particular, the possibility of a robot to detect the relative position of the other robot through its vision and infrared sensors might enable the development of communication forms based on implicit signals (constituted by the presence/absence and eventually by the relative position of a visually detected robot). Moreover, the possibility to vary the value of the radio signals produced by the robot in different environmental and social conditions and the possibility to vary the way in which the robots react to detected radio signals might enable the development of communicatin forms based on explicit signals (i.e. costituted by radio signals with different values).
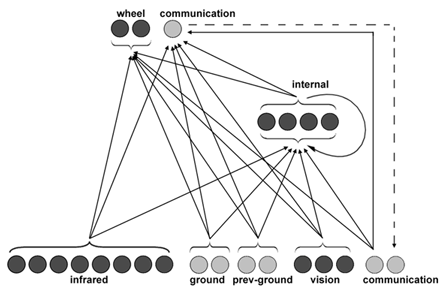
Figure 2. The architecture of the robots' neural controller. The lower, middle and top layers indicate sensory, internal and motor neurons, respectively. Full arrows indicate connections. The dashed arrow indicates that the state of the communication motor neuron at time t is copied into the state of a sensory neuron at time t+1.
The genome of the initial population is constituted by 100 genotypes generated randomly each constituted by 158 genes encoding the value of the connection weights and of the time constant of the internal neurons of a corresponding neural controller. Each gene is encoded with 8 bits and normalized in the range [-5.0,5.0] for connection weights and in the range [0.0,1.0] for time constants. Each neural controller is duplicated 2 times and embodied in two robots forming a team (i.e. the team is homogeneous, in other words the team is formed by individuals provided with identical neural controllers). Every generation the best 20 genotypes (i.e. the genotype corresponding to the best teams) are allowed to reproduce by generating 5 mutated copies of themselves (offpring). Mutations are introduced by 1% if the bits (randomly chosen) flipping each bit of the genotype of each offpsring. The best genotypes are selected by letting the corresponding team of robots to interact with the environment for 20 trials and by scoring the team with 1 point every time the two robots occupy the two different target areas for the first time or after a switch (i.e. after the robot which previously occupied target area #1 moved to target area #2 and vice versa). At the beginning of each trial the two robots are placed in randomly located positions and orientations.
Notice that, although the architecture of the robots' neural controller is fixed and pre-determined by the experimenter, the motor and communication behaviour exhibited by the robots depends on the free parameters (i.e. the connection weights and the time constant of the internal neurons) that are initially assigned randomly and varied through an adaptive process in which variations leading to better performance (with respect to the ability to reach the two areas and then switch areas as quickly as possible) tend to be retained and variations leading to poorer performance tend to be discarded. In other words the robots are left free to determine during the adaptive process the global behaviour that they will exhibit and eventually the number and type of elementary behaviours that will be exhibited and combined/arbitrated in order to produce the robots' overall behaviour. Moreover the robots are left free to determine whether they will communicate or not by exploiting the possibility to produce different explicit signals and to regulate their behaviour on the basis of the detected signals. Finally the robot are left free to determine the number of differnt explicit signals that are produced, the environmental and social context in which each signal is produced, and the way in which each detected signal modulate the robots' behaviour. In other words, the robots are left free to determine both the 'form' and the 'meaning' of different signals as well as how each produced signal is grounded in robots' sensory-motor experiences.
4.2. The motor and communicative behaviour exhibited by evolved teams of robots
By analysing the results obtained at the end of the evolutionary process for different replications of the experiment and for different experimental conditions (i.e. 110x110 and 150x150 cm arenas) we observed that in all replications the evolved robots display an ability to be concurrently located in the two areas and to switch area several times
Evolved robots exploit the possibility to communicate through both implicit and explicit signals in most of the replications.
Brief description of the stretegies displayed by evolved robots
The visual inspection of the fittest evolved solutions indicates that they can be grouped in two qualitatively different strategies. In both strategies, the robots initially display an exploration behaviour which allows them to enter the two target areas (one robot per area) and then display a series of target switching behaviours in which each robot exploit the information provided by the other individual to navigate directly toward the other target area. The first strategy (which will be called symmetrical strategy from now on and which corresponds to the strategy exhibited by the best robots of the best replication performed in the 110x110 arena) is characterized by a synchronized target switching behaviour in which the two robots, located in the two different target areas, simultaneously leave their current target area and move directly toward the other target area (see videos below, left). The second strategy (which will be called asymmetrical strategy from now on and which corresponds to the strategy exhibited by the best robots of the best replication performed in the 150x150 arena) is characterized by a switching behaviour organized in two phases in which first a robot exits from its target area and travels toward the other target area containing the second robot and then the latter robot exits from its target area and travels directly toward the target area previously occupied by the former robot (see videos below, right).
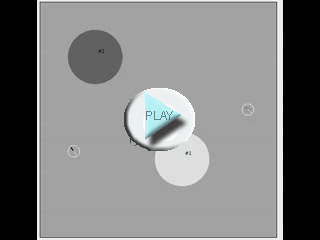


In the next part of this section we restrict our analysis to the replication of the experiment that lead to the asymmetrical strategy solution shown in the previous videos (right).
Motor and communication behaviours repertoire
The analysis of one team of evolved robots displaying the symmetrical strategy shown in the video above indicates that they exhibit the following elementary motor and communicative behaviours:
- A signal-A behaviour which consists in the emission of a signal in the range [0.9 to 1.0]. This signal is always produced by robots located outside target area #2 which are not detecting obstacles.
- A signal-B behaviour which consists in the emission of a signal in the range [0.0 to 0.6]. This signal is always produced by robots located in target area #2.
- An obstacle-avoidance behaviour which consists of a sequence of left-turning actions. This behaviour is always performed near an obstacle (a wall or another robot) when left, frontal, or right infrared sensors of the robot are activated, regardless of the signals perceived. The robot turns on the spot until the frontal side of the robot is free from obstacles.
- A move-straight behaviour which consists of a sequence of move forward actions. This behaviour is always produced by robots located outside target areas when no other robot is perceived visually and no obstacles are detected.
- A follow-border behaviour which consists of a combination of left-turning and move-forward actions that allow a robot to move counter-clockwise following the border of a target area. This behaviour is always produced by robots located on target area #1 or #2 which do not visually perceive the other robot, regardless of the perceived signal.
- An avoid-robot behaviour which consists of a sequence of left-turning actions. This behaviour is produced by robots located outside areas which visually perceive the other robot in all cases beside the cases in which the additional conditions that trigger the execution of the move-toward-robot behaviour hold. The robot turns on the spot until the second robot exits from the first robot's field of view.
- A move-toward-robot behaviour which consists of a sequence of move forward and left-turning actions that allow a robot to move straight by slightly turning toward the direction of a visually perceived robot. This behaviour is always produced by robots which: are located outside target areas, previously visited target area #1, detect signal-B, and detect the other robot in their field of view.
- A look-robot-and-follow-border behaviour which consists of a combination of left-turning, right-turning and move-forward actions that allow the robot to maintain the other robot on the left-side of its field of view and to maintain the same relative position in a target area with respect to the other robot. This latter aspect is realized by remaining on the spot when the other visually-perceived robot is on the frontal or right side of the view field and by moving counter-clockwise along the border of the area when the other robot is on the left side of the view field. This behaviour is always produced by robots which are located in target area #2, perceive signal-A and visually perceive the other robot.
- An exit-area-1 behaviour which consists of one or a few move-forward actions that allow a robot located in target area #1 to exit from this area. This behaviour is always produced by robots located in target area #1 which perceive signal-B and visually detect the other robot in the left part of their view field.
- An exit-area-2 behaviour which consists of one or a few move-forward actions that allow a robot located in target area #2 to exit from this area. This behaviour is always produced by robots located in target area #2 which perceive signal-B.
The arbitration between different behaviours and the coordination between robots is regulated by the social interaction between the two robots mediated by the evolved communication system.
Characteristics of the evolved communication system
The behavioural skills which allow the robots to access and to generate information which has a communicative value include: an exploratory behaviour which allows the robots to identify the location of the two target areas, a follow-border behaviour which allows the robots to maintain information over time, and a look-robot-and-follow-border behaviour which allows the robots to identify and assume a specific position in a target area with respect to the location of the other robot. Interestingly, part of the information conveyed through implicit and explicit signals is not simply extracted from the environment but is generated through the behavioural and communicative interaction of the two robots. For example, information which encodes the location of the centre of the two target areas (which cannot be detected directly by a single robot) is extracted by the two robots through coordinated behaviour which allows the robots to assume a precise relative position in the target area with respect to the other robot.
The signals produced by the robots include two explicit signals (A and B) which encode whether a robot is located outside or inside target area #2, respectively, and an implicit signal which consists of the relative position of the visually perceived robots. The fact that the explicit signals do not differentiate target area #1 from the regions outside target areas does not constitute a source of ambiguity since this information is exploited only by robots currently located in target areas and because robots never occupy the same target area.
The effects of implicit and explicit signals consist in the modification of the robots' motor behaviour which is context dependent (i.e. the type of effect produced and/or whether or not the effect will be produced depends on the state of the robot detecting the signal). More precisely:
- the perception of signal-B always triggers an exit behaviour in robots located in target area #2;
- the perception of signal-B in combination with an implicit signal constituted by the visual perception of the other robot on the left side of the view field always triggers an exit behaviour in robots located in target area #1;
- the perception of signal-B in combination with an implicit signal constituted by the visual perception of the other robot triggers a move-toward-robot behaviour in robots located outside target areas which previously visited target area #1.
- the perception of the implicit signal always triggers an avoid-robot behaviour in robots located outside target areas (with the exception of the case reported above that triggers the execution of the move-toward-robot behaviour).
Evolutionary origin of robots and progressive complexification of communicative and non-communicative skills
The analysis of the individuals of successive generations indicates that the behavioural and communication repertoire exhibited by the robots progressively complexifies throughout generations.
- In the very first generations the robots develop a exploration behaviour that consists in the combination of a move-forward and obstacle-avoidance behaviour. The exhibition of these behaviours allows the robots to occasionally be scored with 1 point when they happen to transit over the two areas at the same time.
- During generations 5-10 the robots develop a remain-on-black-area behaviour that allow them to remain in the black area when they enter in it. The exhibition of this new behaviour increases the probability that the two robot happen to be concurrently located in the two areas since it eliminate the problem caused by the fact that while the latter robot enters in the white area the former exits from the black area.
- The development of a capacity to remain on the black area, however, also play an additional function with respect to that mentioned above since allows the robots to access, for an extended period of time, to an information that is potentially relevant for the other robot (i.e. knowing to be located in the black area). This creates the adaptive condition for the development of an ability to communicate to the other robot whether a robot is located in a black area or not through the production of two different signals (a and b) in the two cases.
- The development of the signal-a and signal-b communication behaviours described above does not lead to an improvement in performance by itself. However, the development of an ability to produce two different signals in the two corresponding conditions create the adaptive conditions for the development of a capacity to exit-from-the-area, independently from whether the area is white or black, in the following generations. This new behaviour allow the robots to manage to occasionally exchange their positions within the two areas, thus improving the performance, when the robot exiting from the white area happen to later enter in the black area and vice versa the robot exiting from the black area happen to later enter inthe white area. Moreover, this new behaviour allows one robot to exit from the black area when also the other robot is located in the same area.
- The development of the behavioural and communication skills described above, in turn, create the conditions for the development of a new behavioural skill that consists in remain-on-the-white-area until the other robot do not enter into the black area. This new behavioural skills allow the team to further increase the probability that the two robot manage to be concurrently located in the two areas for the first time or after a switch by eliminating the problem caused by the fact that while the second robot enter in the black area the first robot exit from the white area.
At this stage of the evolutionary process, the robots are able to reach the areas through a exploration behaviour, to remain on their area until the other robot does not reach the other area, and then to exit and resuming on an exploration behaviour. On the basis of these skills, they are able to be located in the two area for the first time in most of the trial but they are able to switch areas only occasionally given that the finding the other two area through an exploration behaviour require a significant amount of time and given that the robots might re-enter in the same type of areas. In the following generations, however, the robots manage to develop new further skills that allow them to switch areas several times in most of the trials. Indeed:
- At generation 210 the robots develop a move-toward-robot behaviour that allows the robot located in the white area to exit and move toward the robot localized in the black area while keeping the latter robot on the left side of their view field. This new behavioural skills, that allow the robot exiting from the white area to navigate directly toward the black area, is realized thanks to the exploitation of previously developed behavioural and communication skills that ensure the availability of explicit signals that provide an indication of whether the other robot is located on the black are or not and of an implicit signal that provide an indication of the current relative position of the other robot. The development of this new behavioural skill drastically reduces the time needed by the robot located in the white area to switch area.
- Finally, after a long substantially stable phase, at generation 814, the robots develop a new way to remain in the black area that consists in remaining in the border of the area itself while looking to the other robot (i.e. the look-robot-and-follow-border behaviour). Also in this case, this new behaviour is realized thanks to the exploitation of the explicit and implicit signals produced by the robots located outside the black area which in turn are based on the ability to produce the behavioural skills described above. The function of this new behaviour is that to ensure that the robot located in the black target orient itself toward the other robot located in the white area or travelling from the white to the black area and therefore toward the white area. This, in turn, ensures that when the robot exits from the black area, it will travel directly toward the white area (i.e. toward the direction previously occupied by the other robot). The development of this new behaviour also creates the adaptive conditions for a further improvement of the move-toward-robot behaviour previously developed. Indeed, the exhibition of look-robot-and-follow-border behaviour implies that the robot located in the black area assumes a specific relative position with respect to the other robot located in the white area (i.e. the left side of the area with respect to the other robot). The fact that the robot located in the black area now assumes such specific position allows the robot travelling from the white to the black area through the move-toward-robot behaviour to move toward the centre of the black area thus minimising the risk to miss its target, an ability that is indeed refined in the following generations.
Overall this analysis shows how the behavioural and communication skills developed by the robot at a certain stage of the adaptive process often create the conditions for the development of further skills playing additional functionalities which base themselves on previously developed skills. With the sentence "create the conditions for the development of further skills" we mean that the skills that have been developed after would not have been developed (or would have had a lower probability to be developed) without the previously developed skills. With the sentence "..base themselves on previously developed skills" we mean that the newly developed skills require the previously developed skills and that the eventual lost of one or more or the previously developed skills would also imply the lost of the newly developed skills that base on them.
The development of new skills that base themselves on previously developed skills implies that old skills tend to assume additional functions (i.e. the function of supporting the newly developed skills that based themselves on them). The creation of these chains of dependencies probably explain why the adaptive processes observed in this and other replications of the experiments can be described fundamentally as an incremental process in which progresses are realized through the development of new skills and in which previously developed skills tend to be preserved in successive generations.
Moreover, the observation that new behavioural and communication skills often base themselves on simpler previously developed skills implies that the signals which are produced and exploited by the robots are not simply 'grounded' on robots' sensory-motor states but also on robots' behaviours.
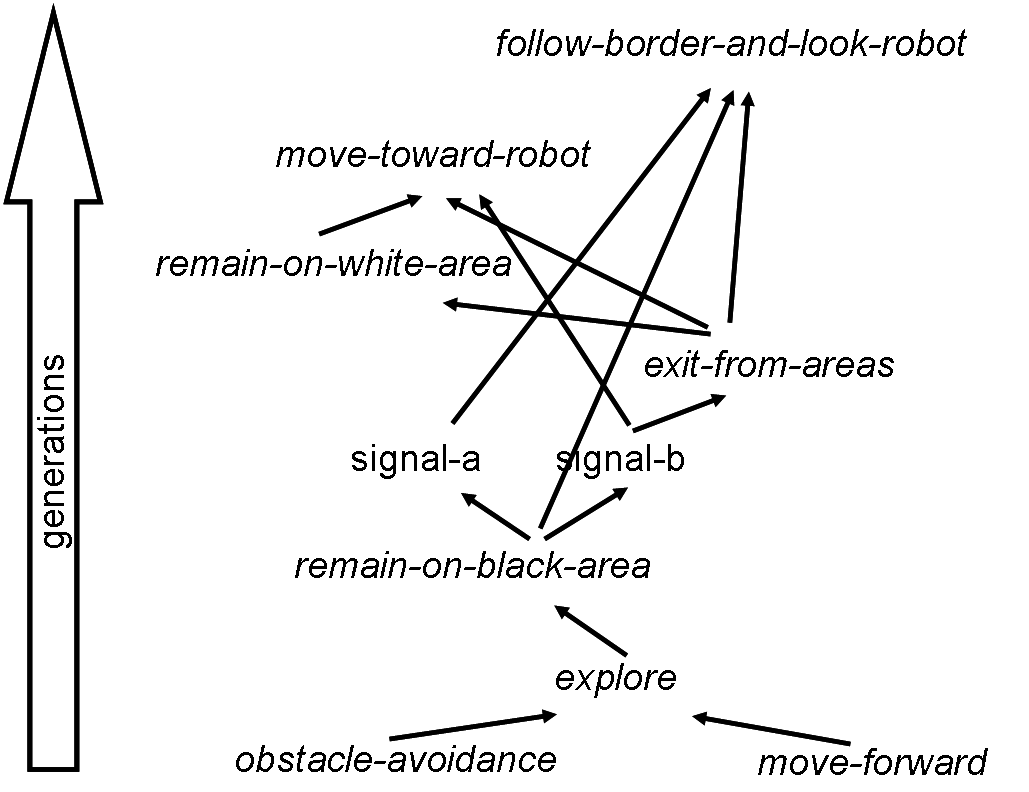
Schematic representation of the relation between the behavioural and communication skills exhibited by the evolved robots. The vertical axis corresponds to the course of the evolutionary process (i.e. the order with which the skills are developed). The arrow indicates the most important dependencies between the skills, i.e. the fact that skills developed at a certain stage of the adaptive process created the adaptive conditions for the development of new skills and the fact that new skills base themselves on previously developed skills (from bottom to top and from top to bottom, respectively).
On the factors that explain how communication can originate from non-communicating individuals
The analysis of the evolutionary process can also help us to better understand how communication can evolved at all despite it require the concurrent development of two complementary abilities: an ability to produce signals that are useful (from the point of view of the signaller, the receiver, or both) and an ability to react to signals in a way that is useful (from the point of view of the signaller, the receiver, or both). As Maynard Smith puts it: "It's no good making a signal unless it is understood, and a signal will not be understood the first time it is made" (Maynard Smith, 1997). From the point of view of the evolution of explicit signalling capabilities, this implies that variations that lead to the production of a useful signal will tend to be retained only if agents already have the complementary ability to react to that signal in an appropriate way, or vice versa, variations that lead to an ability to react to signals in a useful way tend to be retained only if agents already have the complementary ability to produce the corresponding signal. This means that adaptive variations that lead to the production of useful signals or to the exploitation of signals are adaptively neutral (and therefore might be lost) until the corresponding complementary condition is met. This aspect seems to indicate that the evolution of communication would be an extremely unlikely event, a consideration which is in contrast to experimental evidence.
This apparent paradox can be solved by hypothesizing that: (a) originally neutral traits can later acquire a communicative function, and (b) traits originally playing a certain function can later be exapted (Gould, 1977) to play an additional communicative function. These general hypothesis can be further articulated into two cases depending on whether the pre-existing trait consisted in the ability to produce an action which could potentially assume a signalling value (as proposed by Konrad Lorenz and other earlier ethologists) or in the tendency to react in a certain way to signals which could potentially assume a communicative value (Maynard Smith and Harper, 2003).
The results obtained trough the synthetic experiments presented in this paper confirm that indeed, communication can emerge despite the traits which are necessary for its emergence - namely, an ability to produce useful signals and an ability to react to signals appropriately - taken in isolation are adaptively neutral in that they do not, per se, increase the reproductive chances of individuals that possess them. Moreover, the possibility to analyse the course of the evolutionary process in detail, thanks to the synthetic nature of these experiments, allows us to identify how the problem consisting in the need to develop two interdependent traits which are adaptively neutral in isolation is solved. Indeed, the analysis reported above indicates that the evolution of communication skills occurs through the exploitation of traits which originally did not served a communicative function or which did not originally play any functionality.
As an exemplification of a case in which pre-existing signal acquires a communication functionality through a variation in the way in which agents react to the signal (and not through a variation of the signal itself) is constituted by the variations occurring from generation 210 on that lead to the development of the move-toward-robot behaviour (section 3.1.3). Up to this point the signal B, which is produced by robots located in target area #2, triggers an exit behaviour in robot located in target area #1 and #2 (thus allowing the robots to eventually reach the other area later on). From generation 210 on, the same signals play an additional functionality which is realized by triggering a move-toward-robot behaviour in robot located outside target area that previously visited target area #1. The new functionality is achieved through a variation that modify the way in which the robots react to the signal but not the signal itself or the condition in which the signal is produced.
In that respect, the analysis of the experiment described above also confirm the role that in that respect can be played by the so-called producer bias (Mirolli and Parisi, 2000), i.e. the tendency to produce different signals in environmental conditions that trigger different motor behaviours. Indeed, as we stated above, at stage #3 of the developmental process described in the previous section, the ability to produce two different signals when the robot is located inside or outside the black area does not provide any adaptive advantage until the robots do not also develop an ability to regulate their behaviour appropriately depending on the type of detected signal. The development of this signalling ability, however, is not only a matter of chance since at this stage the robot tend to produce two rather different behaviour outside and inside the black area (i.e. respectively moving forward or turning almost on the spot).
An exemplification of a case in which a pre-existing ability to react to signals in a specific way acquires a functionality through a variation of the signal produced, but not of the way in which the robots react to the signal, is constituted by the development of the signal-B which triggers the exit-area-2 behaviour. The tendency to react to this signal by exiting from area #2, in fact, is displayed from generation 10 on. The ability to produce signal-B in area #2 is developed several generations after. The ability to produce signal-B in target area #2 thus immediately assumes a functional role thanks to the exploitation of a pre-existing character of the robots.
References
Marocco D. & Nolfi S. (2007). Emergence of communication in embodied agents evolved for the ability to solve a collective navigation problem.Connection Science, 19(1):53-74.pdf
Marocco D. & Nolfi S. (2006). Origins of communication in evolving robots. In Nolfi S., Baldassarre G., Calabretta R., Hallam J., Marocco D., Miglino O., Meyer J-A, Parisi D. (Eds). From animals to animats 9: Proceedings of the Ninth International Conference on Simulation of Adaptive Behaviour. LNAI. Volume 4095. Berlin, Germany: Springer Verlag.pdf
Marocco D. & Nolfi S. (2006). Emergence of communication in teams of embodied and situated agents. In Cangelosi, A. Smith A.D.M., Smith K. (Eds), Proceeding of the VI International Conference on the Evolution of Language, pp.198-205.pdf
Nolfi S., Mirolli M. (in press). Evolution of Communication and Language in Embodied Agents. Berlin: Springer Verlag.
Nolfi S., Mirolli M. (in press). Evolving communication in embodied agents: Theory, methods, and evaluation. In S. Nolfi & M. Mirolli (Eds.), Evolution of Communication and Language in Embodied Agents. Berlin: Springer Verlag.
Nolfi S., Mirolli M. (in press). Evolving communication in embodied agents: Assessment and open challenges. In S. Nolfi & M. Mirolli (Eds.), Evolution of Communication and Language in Embodied Agents. Berlin: Springer Verlag.
De Greeff J., Nolfi S. (in press). Evolution of implicit and explicit communication in a group of mobile robots. In S. Nolfi & M. Mirolli (Eds.), Evolution of Communication and Language in Embodied Agents. Berlin: Springer Verlag.
Nolfi S. & Gigliotta O. (in press). Evorobot*: A tool for running experiments on the evolution of communication. In S. Nolfi & M. Mirolli (Eds.), Evolution of Communication and Language in Embodied Agents. Berlin: Springer Verlag.
Nolfi S. (2005). Emergence of Communication in Embodied Agents: Co-Adapting Communicative and Non-Communicative Behaviours. Connection Science, 17 (3-4): 231-248.pdf