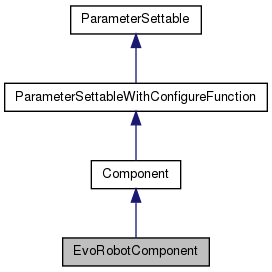
EvoRobotComponent Class Reference
This class setup an evolutionary experiment. More...
Public Slots | |
| void | evolve () |
| Start the evolutionary process (it automatically disable "step-by-step" modality) | |
| void | exceptionDuringOperation (BaseException *e) |
| Warns the user about the exception thrown by evolution or tests (only if not in batch running) | |
| void | onThreadOperationDone (QString message) |
| executed when the current thread operation finish | |
| void | runTest () |
| Run the test associated to the parameter testToRun. | |
| void | runTestFromQAction () |
| Run a Test associated to the QAction whom triggered this slot. | |
| void | stop () |
| Suspend the evolutionary process. | |
Signals | |
| void | actionFinished () |
| emitted when the action (evolve, test, ...) has been finished/stopped | |
Public Member Functions | |
| EvoRobotComponent () | |
| Constructor. | |
| ~EvoRobotComponent () | |
| Destructor. | |
| virtual void | configure (farsa::ConfigurationParameters ¶ms, QString prefix) |
| Configure function. | |
| Evoga * | getGA () |
| Return the Evoga. | |
| ComponentUI * | getUIManager () |
| Return an instance of EvoRobotViewer that manage the viewers. | |
| virtual void | postConfigureInitialization () |
| declare resources and initialize sensors | |
| virtual void | save (farsa::ConfigurationParameters ¶ms, QString prefix) |
| Save function. | |
Static Public Member Functions | |
| static void | describe (QString type) |
| Description of all parameters. | |
Detailed Description
This class setup an evolutionary experiment.
Definition at line 39 of file evorobotcomponent.h.
Constructor & Destructor Documentation
Constructor.
Definition at line 95 of file evorobotcomponent.cpp.
References EvoRobotComponent::exceptionDuringOperation().
| ~EvoRobotComponent | ( | ) |
Member Function Documentation
| void actionFinished | ( | ) | [signal] |
emitted when the action (evolve, test, ...) has been finished/stopped
Referenced by EvoRobotComponent::onThreadOperationDone().
| void configure | ( | farsa::ConfigurationParameters & | params, |
| QString | prefix | ||
| ) | [virtual] |
Configure function.
Implements Component.
Definition at line 116 of file evorobotcomponent.cpp.
References AvailableTestList::addTest(), ConfigurationHelper::getBool(), ConfigurationParameters::getGroupsWithPrefixList(), ConfigurationParameters::getObjectFromGroup(), ConfigurationHelper::getString(), WorkerThread::quit(), AbstractTest::setComponent(), and Component::setStatus().
| void describe | ( | QString | type | ) | [static] |
Description of all parameters.
Reimplemented from ParameterSettable.
Definition at line 211 of file evorobotcomponent.cpp.
References ParameterSettable::addTypeDescription(), ParameterSettable::AllowMultiple, ParameterSettable::Descriptor::describeSubgroup(), ParameterSettable::SubgroupDescriptor::help(), ParameterSettable::IsMandatory, ParameterSettable::SubgroupDescriptor::props(), and ParameterSettable::SubgroupDescriptor::type().
| void evolve | ( | ) | [slot] |
Start the evolutionary process (it automatically disable "step-by-step" modality)
Definition at line 225 of file evorobotcomponent.cpp.
References WorkerThread::addOperation(), Logger::error(), Evoga::evolveAllReplicas(), Evoga::getEvoRobotExperiment(), Evoga::resetStop(), and EvoRobotExperiment::setActivityPhase().
| void exceptionDuringOperation | ( | BaseException * | e | ) | [slot] |
Warns the user about the exception thrown by evolution or tests (only if not in batch running)
Definition at line 277 of file evorobotcomponent.cpp.
References Logger::error().
Referenced by EvoRobotComponent::EvoRobotComponent().
| Evoga * getGA | ( | ) |
Return the Evoga.
Definition at line 217 of file evorobotcomponent.cpp.
Referenced by TestRandom::buildRandomDNA(), EvoRobotViewer::EvoRobotViewer(), TestIndividual::runTest(), TestRandom::runTest(), and TestIndividual::setPopulationToTest().
| ComponentUI * getUIManager | ( | ) | [virtual] |
Return an instance of EvoRobotViewer that manage the viewers.
Implements Component.
Definition at line 112 of file evorobotcomponent.cpp.
| void onThreadOperationDone | ( | QString | message | ) | [slot] |
executed when the current thread operation finish
- Parameters:
-
message is the message about the operation done
Definition at line 284 of file evorobotcomponent.cpp.
References EvoRobotComponent::actionFinished(), and Component::setStatus().
Referenced by TestOperation::run(), and EvolveOperation::run().
| void postConfigureInitialization | ( | ) | [virtual] |
declare resources and initialize sensors
Reimplemented from ParameterSettable.
Definition at line 208 of file evorobotcomponent.cpp.
| void runTest | ( | ) | [slot] |
Run the test associated to the parameter testToRun.
Definition at line 244 of file evorobotcomponent.cpp.
References WorkerThread::addOperation(), Logger::error(), AvailableTestList::getTest(), Evoga::resetStop(), and AbstractTest::runTest().
Referenced by EvoRobotComponent::runTestFromQAction().
| void runTestFromQAction | ( | ) | [slot] |
Run a Test associated to the QAction whom triggered this slot.
Definition at line 266 of file evorobotcomponent.cpp.
References Logger::error(), and EvoRobotComponent::runTest().
| void save | ( | farsa::ConfigurationParameters & | params, |
| QString | prefix | ||
| ) | [virtual] |
Save function.
Implements Component.
Definition at line 204 of file evorobotcomponent.cpp.
References Evoga::save().
| void stop | ( | ) | [slot] |
Suspend the evolutionary process.
Definition at line 221 of file evorobotcomponent.cpp.
References WorkerThread::stopCurrentOperation().
The documentation for this class was generated from the following files:
- experiments/evorobot/include/evorobotcomponent.h
- experiments/evorobot/src/evorobotcomponent.cpp