PhyJoint Class Reference
Public Member Functions | |
| PhyJoint (PhyObject *parent, PhyObject *child) | |
| Constructor. | |
| virtual | ~PhyJoint () |
| Destructor. | |
| virtual wVector | centre () const =0 |
| Return the centre of this joint in world coordinate. | |
| virtual const PhyObject * | child () const |
| Return the child object attached to this joint (see Newton Documentation) (const version) | |
| virtual PhyObject * | child () |
| Return the child object attached to this joint (see Newton Documentation) | |
| virtual QVector< PhyDOF * > | dofs () |
| Return descriptions of DOF. | |
| void | enable (bool b) |
| enable/disable the joint | |
| bool | isEnabled () const |
| Return true if the joint is enabled. | |
| virtual unsigned int | numDofs () const |
| Return the number of DOF constrained by this joint. | |
| virtual PhyObject * | parent () |
| Return the parent object; (NULL means an object attached to static world; see Netwon Documentation) | |
| virtual const PhyObject * | parent () const |
| Return the parent object; (NULL means an object attached to static world; see Netwon Documentation) (const version) | |
| virtual void | postUpdate () |
| postUpdate the PhyJoint this method is called at each step of the world just after the physic update | |
| virtual void | preUpdate () |
| preUpdate the PhyJoint this method is called at each step of the world just before the physic update | |
| virtual void | updateJointInfo ()=0 |
| Update the Joint informations (each PhyDOF will be updated) | |
| World * | world () |
| Return the World. | |
| const World * | world () const |
| Return the World (const version) | |
Protected Member Functions | |
| virtual void | updateJoint (real timestep)=0 |
Protected Attributes | |
| PhyObjectPrivate * | childpriv |
| PhyObject * | childv |
| child object | |
| QVector< PhyDOF * > | dofsv |
| vector of DOF's joint | |
| int | dofv |
| number of DOF | |
| bool | enabled |
| true if is enabled, false otherwise | |
| PhyObjectPrivate * | parentpriv |
| PhyObject * | parentv |
| parent object | |
| PhyJointPrivate * | priv |
| Engine encapsulation. | |
| WorldPrivate * | worldpriv |
| World * | worldv |
| world | |
Friends | |
| class | PhyJointPrivate |
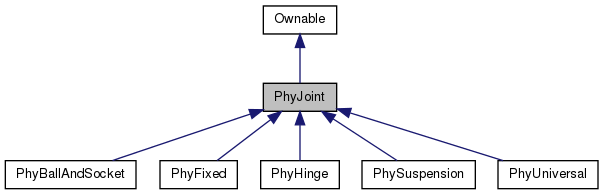
Detailed Description
PhyJoint class.
\
- Motivation
- Common interface among Joints.
- Description
- This joint doesn't add constraints... so, it's a zero-DOF joint :-)
- Warnings
- Warnings
Definition at line 336 of file phyjoint.h.
Constructor & Destructor Documentation
Constructor.
- Parameters:
-
parent is the parent object. The local frame is translated toward centre for create the complete local coordinate frame of this joint child is the child object
Definition at line 30 of file phyjoint.cpp.
References PhyJoint::child(), PhyJoint::childv, PhyJoint::enabled, PhyJoint::parent(), PhyJoint::parentv, PhyObject::priv, PhyJoint::priv, WObject::world(), and PhyJoint::worldv.
| ~PhyJoint | ( | ) | [virtual] |
Destructor.
Definition at line 52 of file phyjoint.cpp.
References PhyJoint::dofsv, PhyJoint::priv, and PhyJoint::worldv.
Member Function Documentation
| virtual wVector centre | ( | ) | const [pure virtual] |
Return the centre of this joint in world coordinate.
Implemented in PhyBallAndSocket, PhyFixed, PhyHinge, and PhySuspension.
| virtual PhyObject* child | ( | ) | [inline, virtual] |
Return the child object attached to this joint (see Newton Documentation)
Definition at line 348 of file phyjoint.h.
Referenced by PhyJoint::PhyJoint(), PhyUniversal::updateJointInfo(), PhySuspension::updateJointInfo(), PhyHinge::updateJointInfo(), PhyFixed::updateJointInfo(), and PhyBallAndSocket::updateJointInfo().
| virtual const PhyObject* child | ( | ) | const [inline, virtual] |
Return the child object attached to this joint (see Newton Documentation) (const version)
Definition at line 352 of file phyjoint.h.
| virtual QVector<PhyDOF*> dofs | ( | ) | [inline, virtual] |
Return descriptions of DOF.
Definition at line 368 of file phyjoint.h.
Referenced by PhyObjectsGroup::addJointDOF(), PhyMarXbot::PhyMarXbot(), and PhyObjectsGroup::setDOFPosition().
| void enable | ( | bool | b | ) |
| bool isEnabled | ( | ) | const [inline] |
Return true if the joint is enabled.
Definition at line 374 of file phyjoint.h.
| virtual unsigned int numDofs | ( | ) | const [inline, virtual] |
Return the number of DOF constrained by this joint.
Definition at line 364 of file phyjoint.h.
Referenced by PhyObjectsGroup::addJointDOF(), and PhyiCub::PhyiCub().
| virtual const PhyObject* parent | ( | ) | const [inline, virtual] |
Return the parent object; (NULL means an object attached to static world; see Netwon Documentation) (const version)
Definition at line 360 of file phyjoint.h.
| virtual PhyObject* parent | ( | ) | [inline, virtual] |
Return the parent object; (NULL means an object attached to static world; see Netwon Documentation)
Definition at line 356 of file phyjoint.h.
Referenced by PhyUniversal::centre(), PhySuspension::centre(), PhyHinge::centre(), PhyFixed::centre(), PhyBallAndSocket::centre(), PhyJoint::PhyJoint(), PhyUniversal::updateJointInfo(), PhySuspension::updateJointInfo(), PhyHinge::updateJointInfo(), PhyFixed::updateJointInfo(), and PhyBallAndSocket::updateJointInfo().
| virtual void postUpdate | ( | ) | [inline, virtual] |
postUpdate the PhyJoint this method is called at each step of the world just after the physic update
Definition at line 405 of file phyjoint.h.
| virtual void preUpdate | ( | ) | [inline, virtual] |
preUpdate the PhyJoint this method is called at each step of the world just before the physic update
Definition at line 398 of file phyjoint.h.
| virtual void updateJointInfo | ( | ) | [pure virtual] |
Update the Joint informations (each PhyDOF will be updated)
Implemented in PhyBallAndSocket, PhyFixed, PhyHinge, PhySuspension, and PhyUniversal.
Referenced by PhyMarXbot::changedMatrix(), PhyiCub::changedMatrix(), PhyiCub::configurePosture(), and PhyMarXbot::PhyMarXbot().
| const World* world | ( | ) | const [inline] |
Return the World (const version)
Definition at line 390 of file phyjoint.h.
| World* world | ( | ) | [inline] |
Return the World.
Definition at line 385 of file phyjoint.h.
Referenced by DOFStatusListener::update(), PhySuspension::updateJointInfo(), and PhyHinge::updateJointInfo().
Member Data Documentation
vector of DOF's joint
Definition at line 407 of file phyjoint.h.
Referenced by PhyHinge::PhyHinge(), PhySuspension::PhySuspension(), PhyUniversal::PhyUniversal(), PhySuspension::updateJointInfo(), PhyHinge::updateJointInfo(), and PhyJoint::~PhyJoint().
int dofv [protected] |
number of DOF
Definition at line 413 of file phyjoint.h.
Referenced by PhyBallAndSocket::PhyBallAndSocket(), PhyFixed::PhyFixed(), PhyHinge::PhyHinge(), PhySuspension::PhySuspension(), and PhyUniversal::PhyUniversal().
bool enabled [protected] |
true if is enabled, false otherwise
Definition at line 415 of file phyjoint.h.
Referenced by PhyJoint::enable(), PhyJoint::PhyJoint(), PhySuspension::updateJointInfo(), and PhyHinge::updateJointInfo().
PhyJointPrivate* priv [protected] |
Engine encapsulation.
Definition at line 424 of file phyjoint.h.
Referenced by PhyUniversal::createPrivateJoint(), PhySuspension::createPrivateJoint(), PhyHinge::createPrivateJoint(), PhyFixed::createPrivateJoint(), PhyBallAndSocket::createPrivateJoint(), PhyJoint::PhyJoint(), PhySuspension::updateJointInfo(), PhyHinge::updateJointInfo(), and PhyJoint::~PhyJoint().
world
Definition at line 421 of file phyjoint.h.
Referenced by PhyJoint::PhyJoint(), and PhyJoint::~PhyJoint().
The documentation for this class was generated from the following files:
- worldsim/include/phyjoint.h
- worldsim/src/phyjoint.cpp