The infrared ground bottom sensors of the MarXbot. More...
Public Member Functions | |
| MarXbotGroundBottomIRSensor (ConfigurationParameters ¶ms, QString prefix) | |
| Constructor. | |
| virtual | ~MarXbotGroundBottomIRSensor () |
| Destructor. | |
| bool | invertActivation () const |
| virtual void | save (ConfigurationParameters ¶ms, QString prefix) |
| Saves current parameters into the given ConfigurationParameters object. | |
| virtual int | size () |
| Returns the number of neurons required by this sensor. | |
| virtual void | update () |
| Performs the sensor update. This also modifies the activation of input neurons. | |
 Public Member Functions inherited from MarXbotSensor Public Member Functions inherited from MarXbotSensor | |
| MarXbotSensor (ConfigurationParameters ¶ms, QString prefix) | |
| Constructor. | |
| virtual | ~MarXbotSensor () |
| Destructor. | |
| Public Member Functions inherited from Sensor | |
| Sensor (ConfigurationParameters ¶ms, QString prefix) | |
| Constructor and Configure. | |
| ~Sensor () | |
| Destructor. | |
| QString | name () |
| Return the name of the Sensor. | |
| void | setName (QString name) |
| Use this method for changing the name of the Sensor. | |
| Public Member Functions inherited from NoisyDevice | |
| NoisyDevice (ConfigurationParameters ¶ms, QString prefix) | |
| Constructor and Configure. | |
| ~NoisyDevice () | |
| Destructor. | |
| Public Member Functions inherited from ParameterSettableInConstructor | |
| ParameterSettableInConstructor (ConfigurationParameters &, QString) | |
| void | addObserver (RuntimeParameterObserver *obs) |
| T | getRuntimeParameter (QString paramName) |
| virtual ParameterSettableUI * | getUIManager () |
| ParameterSettable () | |
| virtual void | postConfigureInitialization () |
| void | removeObserver (RuntimeParameterObserver *obs) |
| void | setRuntimeParameter (QString paramName, T newvalue) |
| QString | typeName () const |
| Public Member Functions inherited from ConcurrentResourcesUser | |
| void | addUsableResource (QString resource) |
| void | addUsableResources (QStringList resources) |
| void | declareResource (QString name, T *resource, QString lockBuddy="") |
| void | deleteResource (QString name) |
| T * | getResource (QString name, bool *resourceExists=NULL) |
| bool | hasResource (QString name) const |
| void | removeAllUsableResources () |
| void | removeUsableResource (QString resource) |
| void | removeUsableResources (QStringList resources) |
| virtual void | shareResourcesWith (ResourcesUser *buddy) |
| void | usableResources (QStringList resources) |
| bool | usedResourcesExist (QStringList *nonExistingResources=NULL) const |
Static Public Member Functions | |
| static void | describe (QString type) |
| Generates a description of this class and its parameters. | |
Additional Inherited Members | |
| Public Types inherited from ParameterSettableInConstructor | |
| enum | Property |
| Public Types inherited from ConcurrentResourcesUser | |
|
typedef Resource::ResourceChangeType | ResourceChangeType |
| Public Attributes inherited from ParameterSettableInConstructor | |
| AllowMultiple | |
| Default | |
| IsList | |
| IsMandatory | |
| Static Public Attributes inherited from ParameterSettableInConstructor | |
| static const double | Infinity |
| static const int | MaxInteger |
| static const int | MinInteger |
| Protected Member Functions inherited from MarXbotSensor | |
| virtual void | resourceChanged (QString resourceName, ResourceChangeType changeType) |
| The function called when a resource used here is changed. | |
| Static Protected Member Functions inherited from ParameterSettableInConstructor | |
| static Descriptor | addTypeDescription (QString type, QString shortHelp, QString longHelp=QString("")) |
| static void | setGraphicalEditor (QString type) |
| Protected Attributes inherited from MarXbotSensor | |
| QString | m_marxbotResource |
| The name of the resource associated with the MarXbot robot. | |
| QString | m_neuronsIteratorResource |
| The name of th resource associated with the neural network iterator. | |
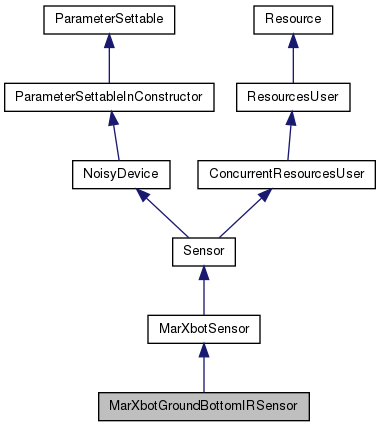
Detailed Description
The infrared ground bottom sensors of the MarXbot.
The infrared ground sensors below the battery pack of the MarXbot. This only works with objects in the arena. This sensor applies noise if requested
In addition to all parameters defined by the parent class (MarXbot), this class also defines the following parameters:
- invertActivation: if true the sensor is activated with 0.0 above white and with 1.0 above black, if false the opposite holds. The default value is false
The resources required by this Sensor are the same as those of the parent class plus:
- arena: the instance of the Arena object where the robot lives
Definition at line 235 of file marxbotsensors.h.
Constructor & Destructor Documentation
| MarXbotGroundBottomIRSensor | ( | ConfigurationParameters & | params, |
| QString | prefix | ||
| ) |
Constructor.
Creates and configures the sensor
- Parameters
-
params the ConfigurationParameters containing the parameters prefix the path prefix to the paramters for this Sensor
Definition at line 187 of file marxbotsensors.cpp.
References ConcurrentResourcesUser::addUsableResource().
|
virtual |
Destructor.
Definition at line 198 of file marxbotsensors.cpp.
Member Function Documentation
|
static |
Generates a description of this class and its parameters.
- Parameters
-
type the string representation of this class name
Reimplemented from MarXbotSensor.
Definition at line 213 of file marxbotsensors.cpp.
References ParameterSettableInConstructor::addTypeDescription(), ParameterSettable::BoolDescriptor::def(), ParameterSettable::Descriptor::describeBool(), and ParameterSettable::BoolDescriptor::help().
|
virtual |
Saves current parameters into the given ConfigurationParameters object.
- Parameters
-
params the ConfigurationParameters object in which parameters should be saved prefix the name and path of the group where to save parametrs
Reimplemented from MarXbotSensor.
Definition at line 203 of file marxbotsensors.cpp.
References ConfigurationParameters::createParameter(), and ConfigurationParameters::startObjectParameters().
|
virtual |
Returns the number of neurons required by this sensor.
- Returns
- the number of neurons required by this sensor
Implements Sensor.
Definition at line 246 of file marxbotsensors.cpp.
Referenced by MarXbotGroundBottomIRSensor::update().
|
virtual |
Performs the sensor update. This also modifies the activation of input neurons.
Implements Sensor.
Definition at line 223 of file marxbotsensors.cpp.
References NoisyDevice::applyNoise(), Sensor::checkAllNeededResourcesExist(), PhyMarXbot::groundBottomIRSensorController(), PhyMarXbot::matrix(), Sensor::name(), NeuronsIterator::nextNeuron(), SimulatedIRGroundSensorController::sensors(), NeuronsIterator::setCurrentBlock(), NeuronsIterator::setInput(), MarXbotGroundBottomIRSensor::size(), and wMatrix::transformVector().
The documentation for this class was generated from the following files:
- experiments/include/marxbotsensors.h
- experiments/src/marxbotsensors.cpp